Controls
This page contains fill-in notes on Control lectures for the courses including ME 370 and ME 461.
These notes were originally written by Dr. Rico Picone and the master copy is available on his site. This copy may have changes from the last time I taught a course which used this material, but may also be out of date.
Full Text

Individual lecture files
 intro.perf Performance
intro.perf Performance
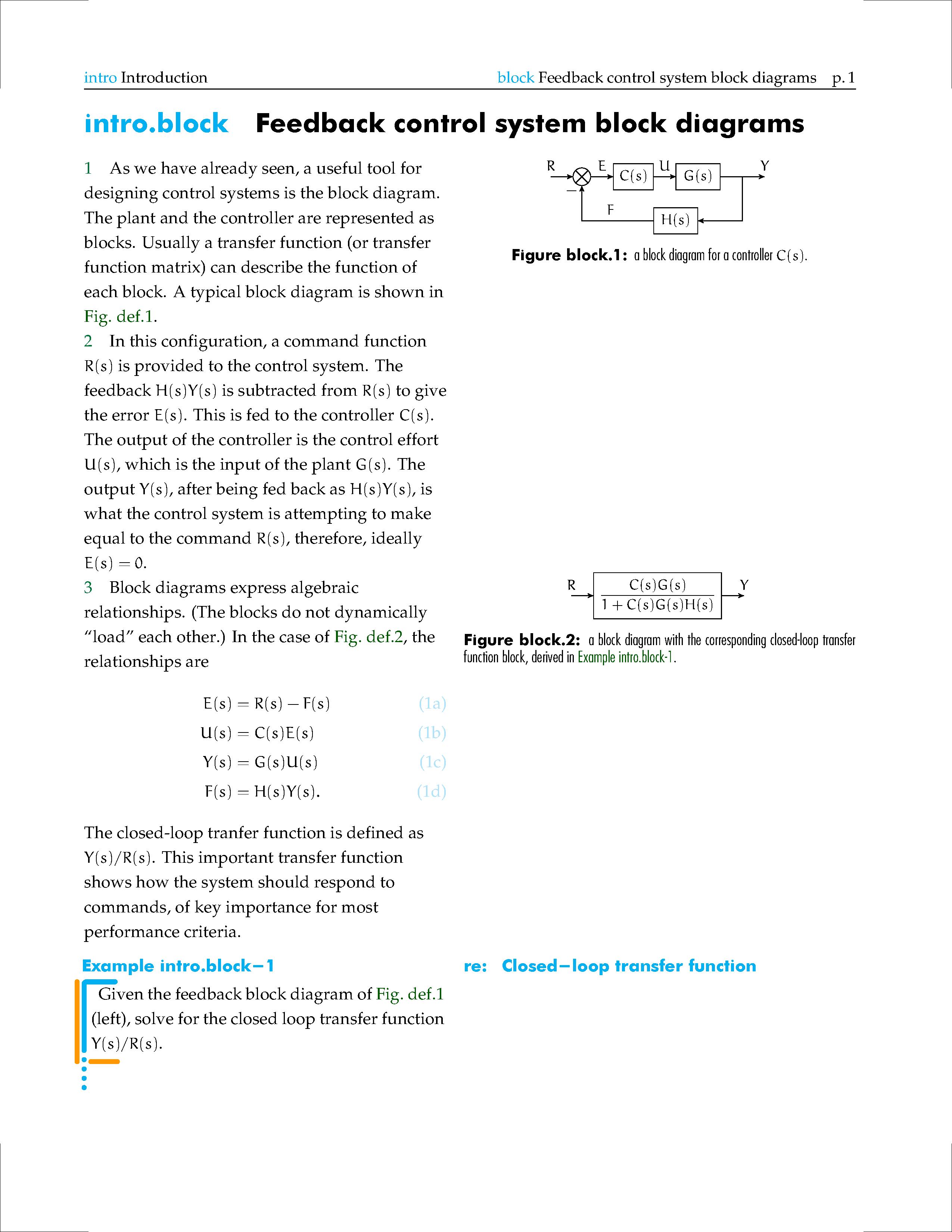 intro.block Feedback control system block diagrams
intro.block Feedback control system block diagrams
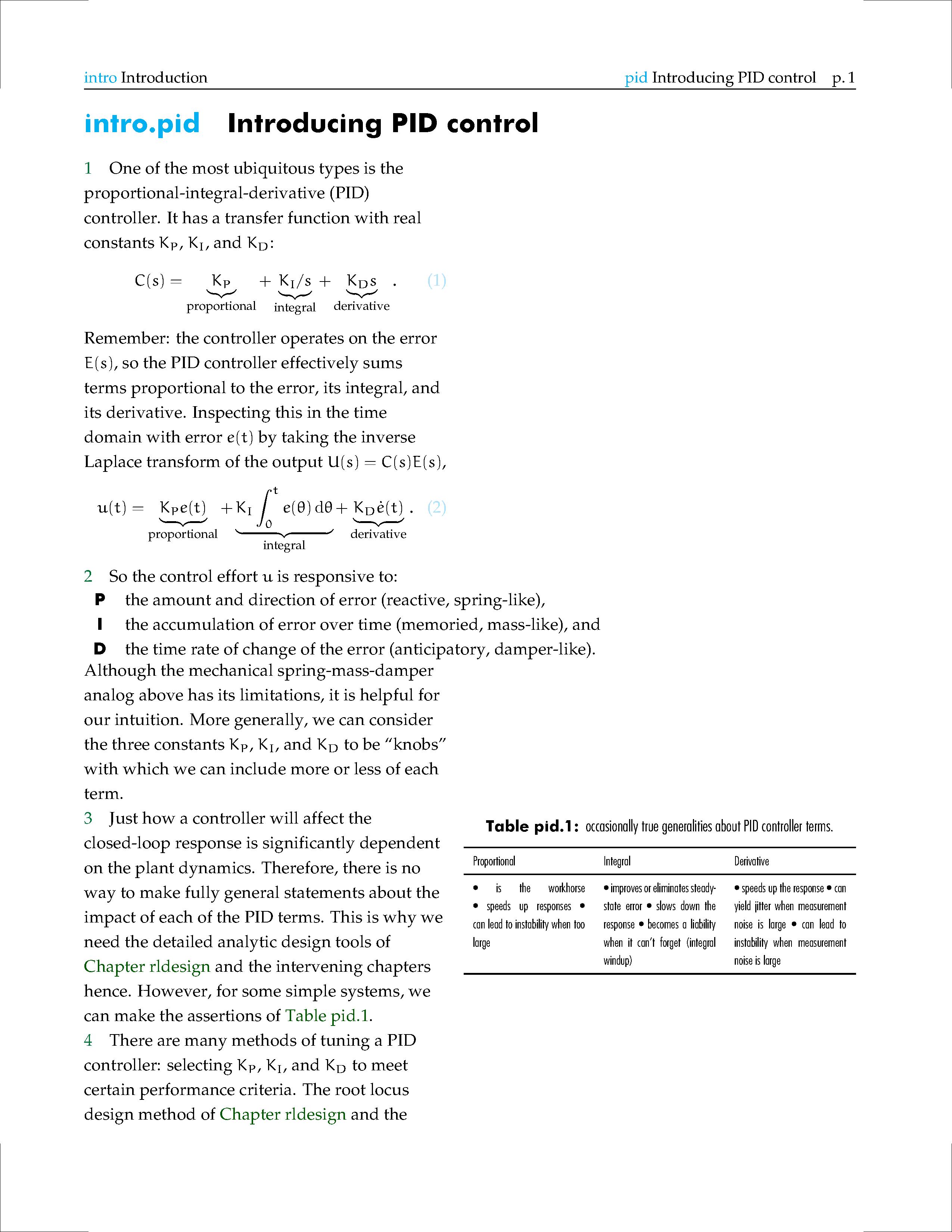 intro.pid Introducing PID control
intro.pid Introducing PID control
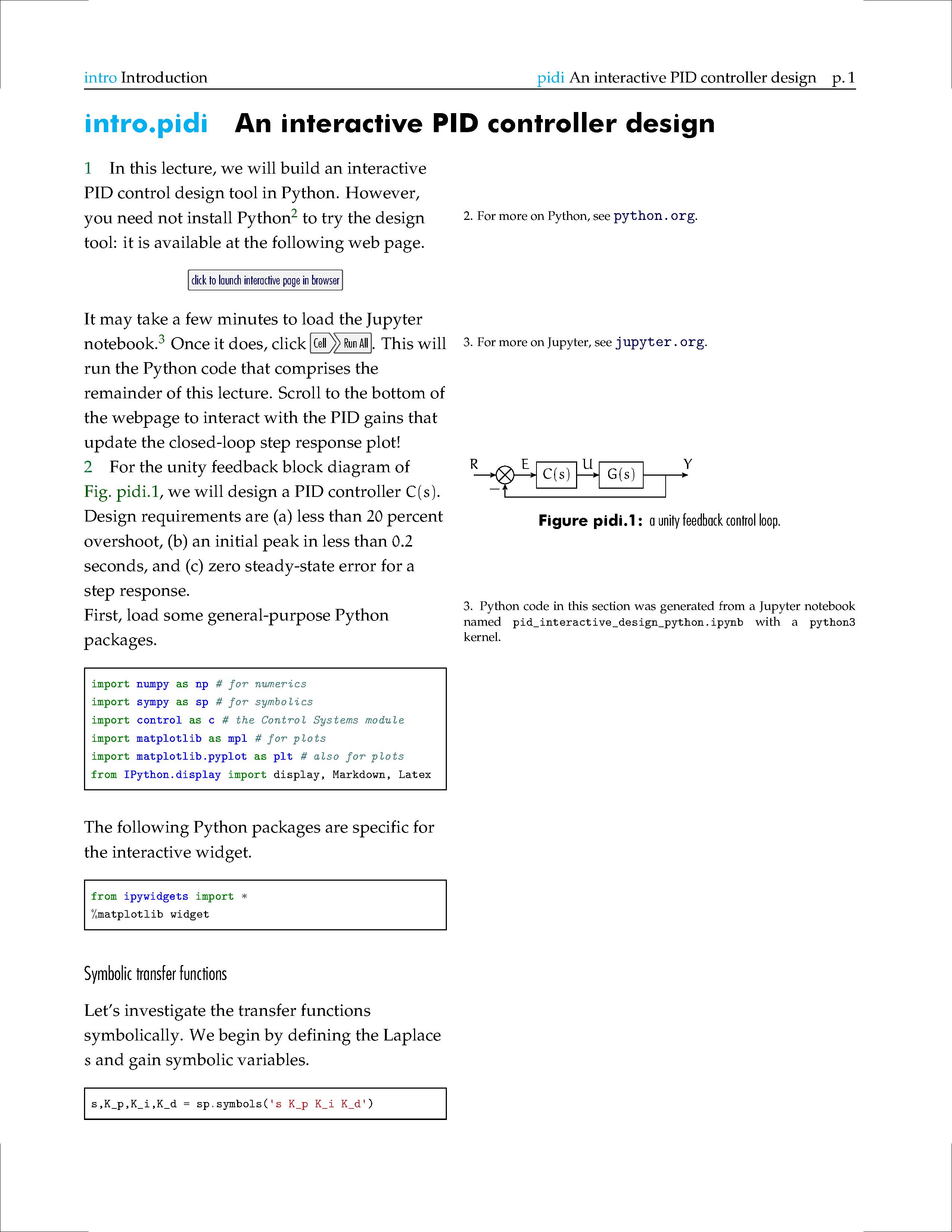 intro.pidi An interactive PID controller design
intro.pidi An interactive PID controller design
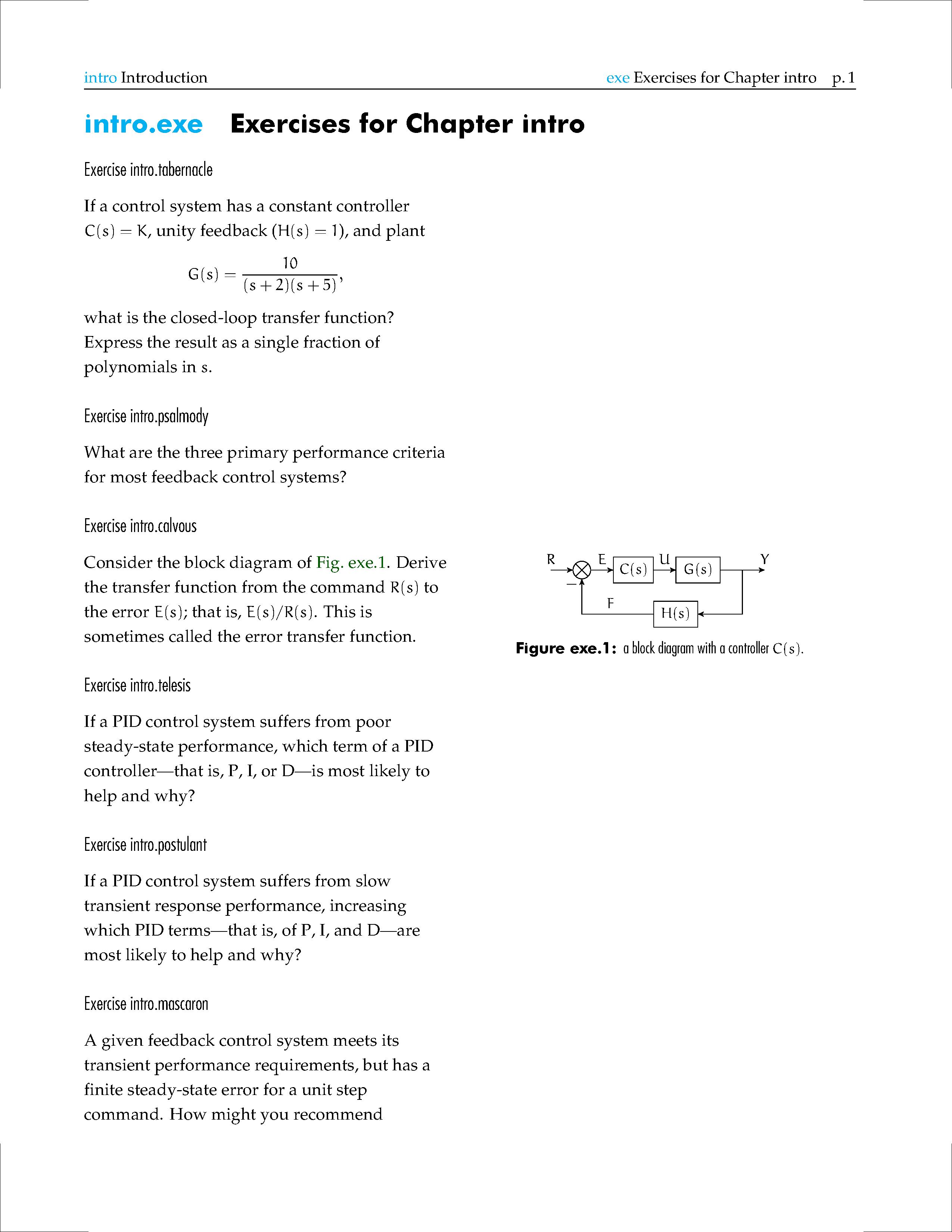 intro.exe Exercises for Chapter intro
intro.exe Exercises for Chapter intro
 stab.intro Introduction
stab.intro Introduction
![]() stab.tf Stability from the transfer function
stab.tf Stability from the transfer function
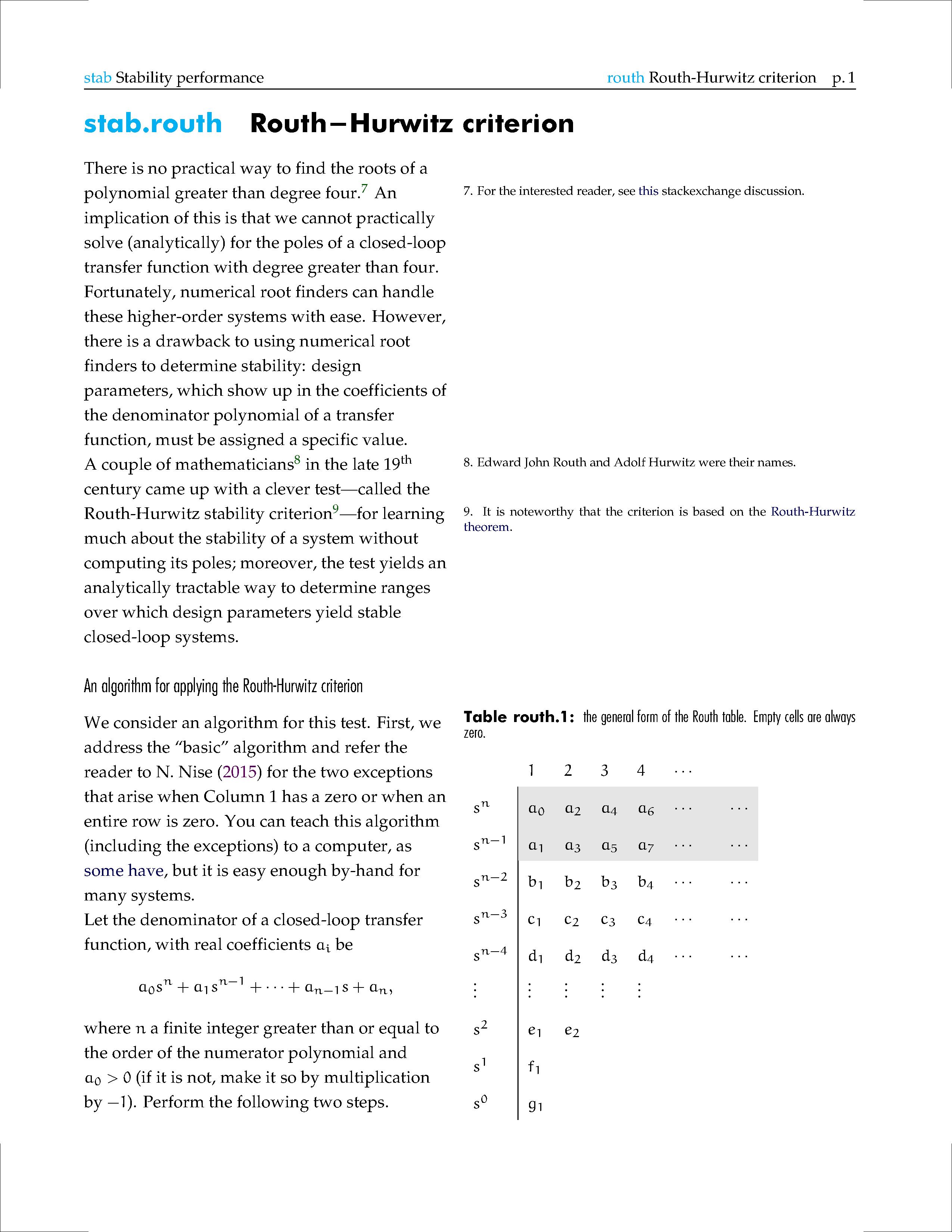 stab.routh Routh-Hurwitz criterion
stab.routh Routh-Hurwitz criterion
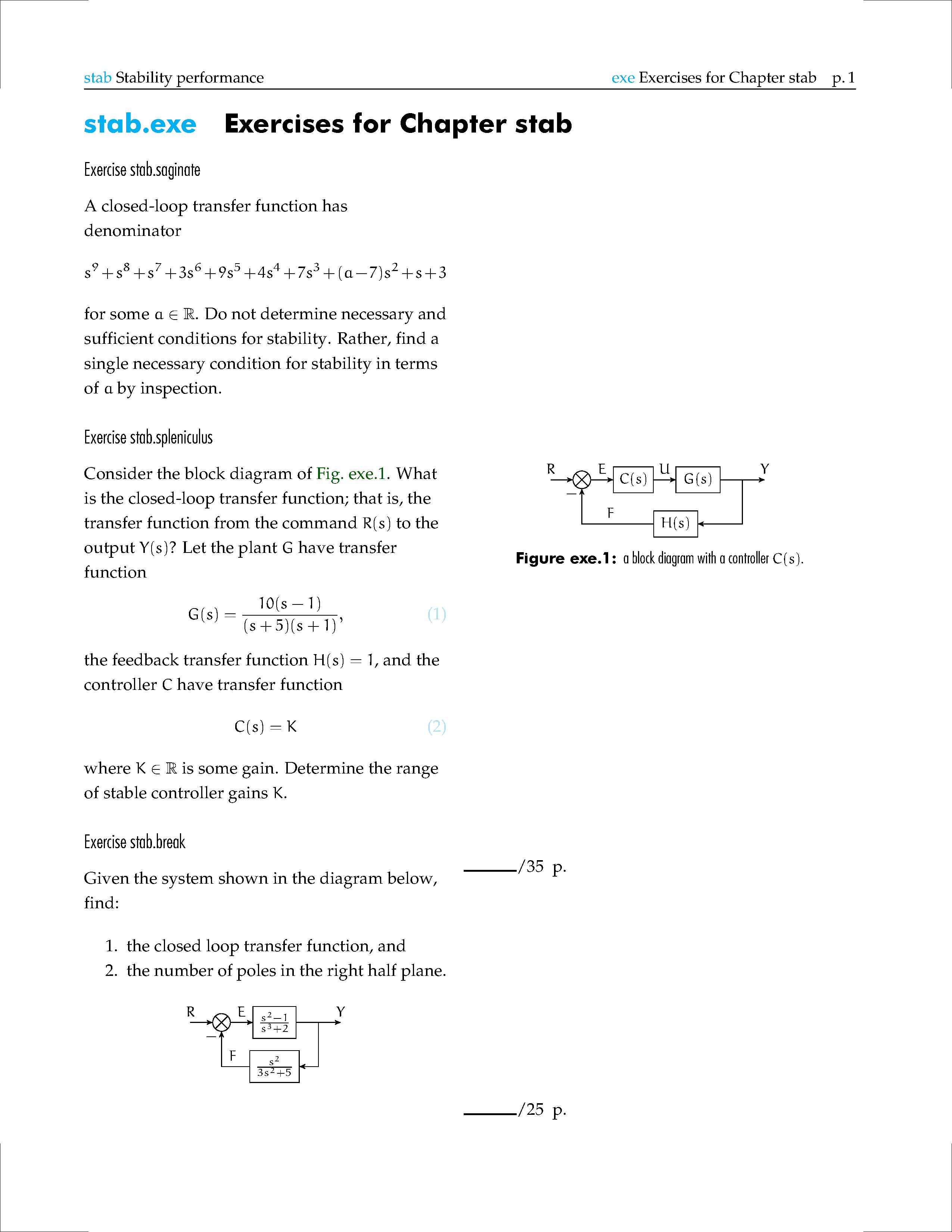 stab.exe Exercises for Chapter stab
stab.exe Exercises for Chapter stab
![]() trans.char Transient response characteristics
trans.char Transient response characteristics
![]() trans.exact Exact analytical trans response char of first- and second-order sys
trans.exact Exact analytical trans response char of first- and second-order sys
![]() trans.approx Approx analytical transient response characteristics
trans.approx Approx analytical transient response characteristics
![]() trans.sim Simulation
trans.sim Simulation
![]() trans.exe Exercises for Chapter trans
trans.exe Exercises for Chapter trans
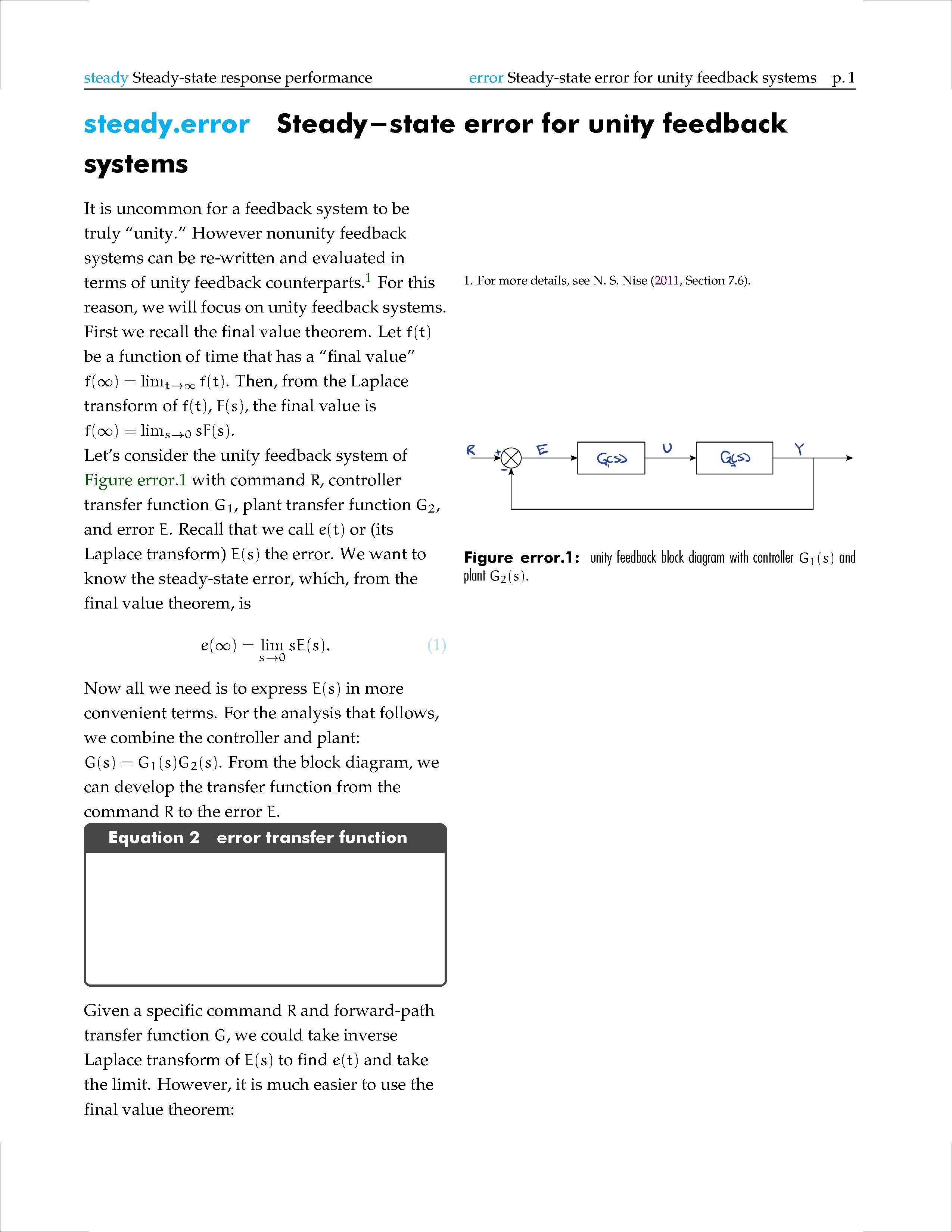 steady.error Steady-state error for unity feedback systems
steady.error Steady-state error for unity feedback systems
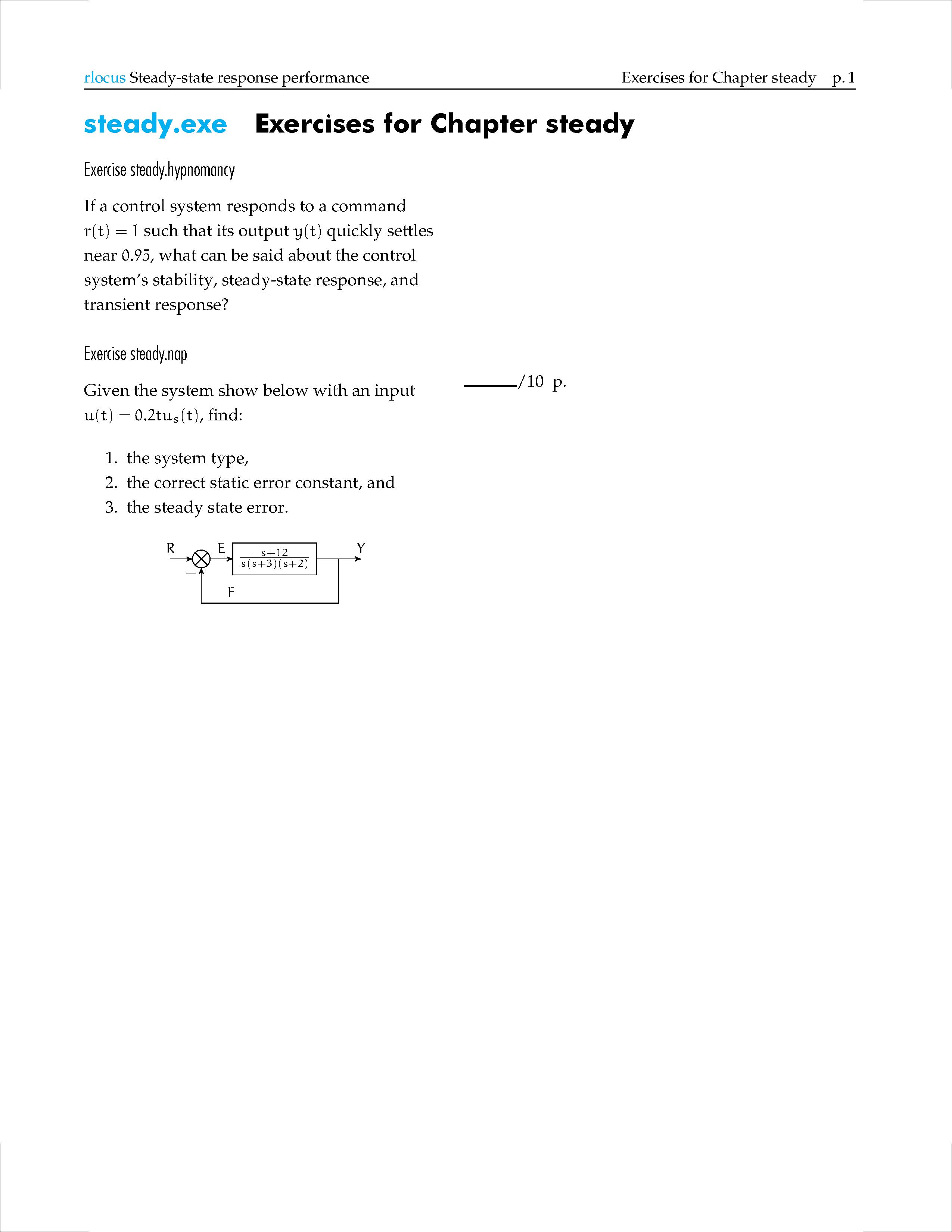 steady.exe Exercises for Chapter steady
steady.exe Exercises for Chapter steady
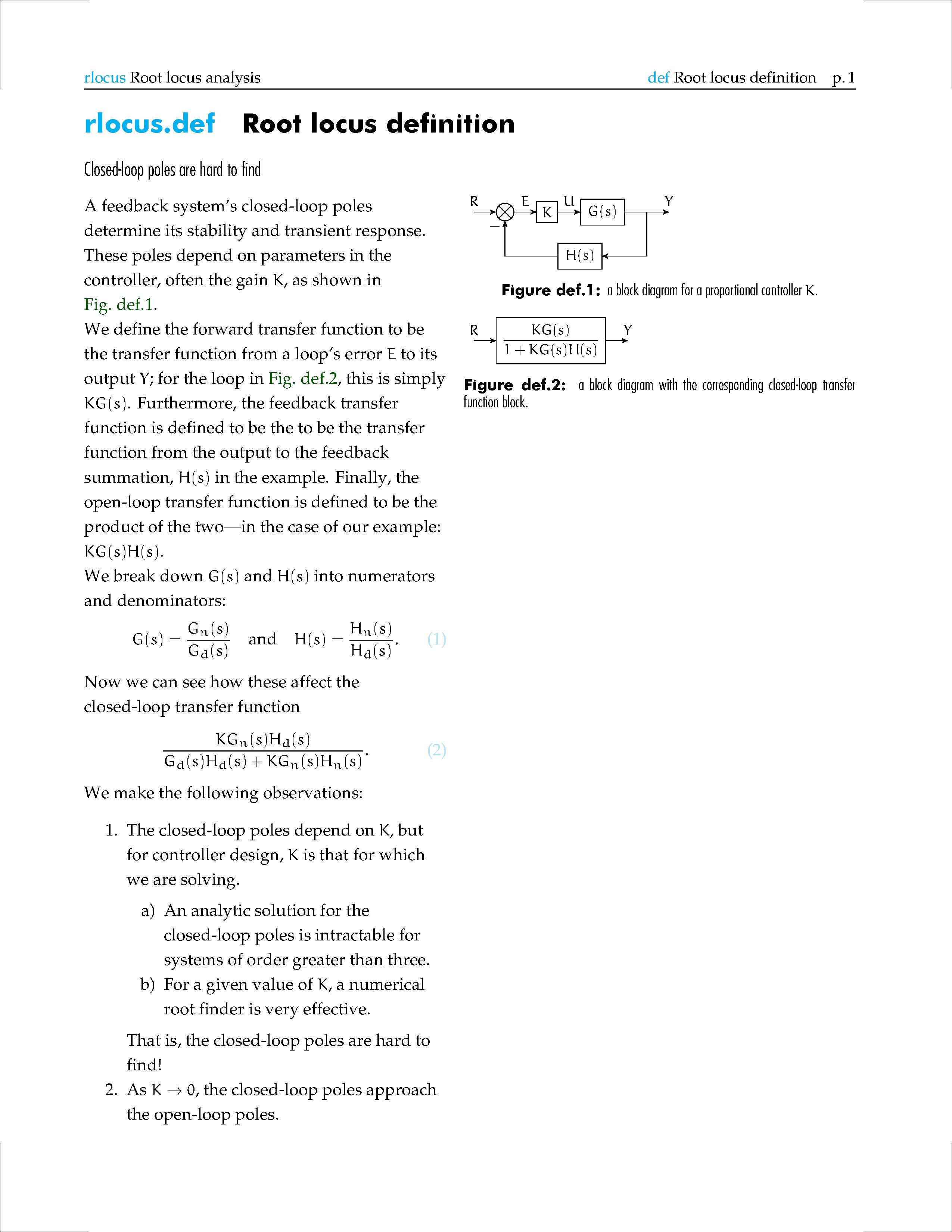 rlocus.def Root locus definition
rlocus.def Root locus definition
 rlocus.sketch Sketching the root locus
rlocus.sketch Sketching the root locus
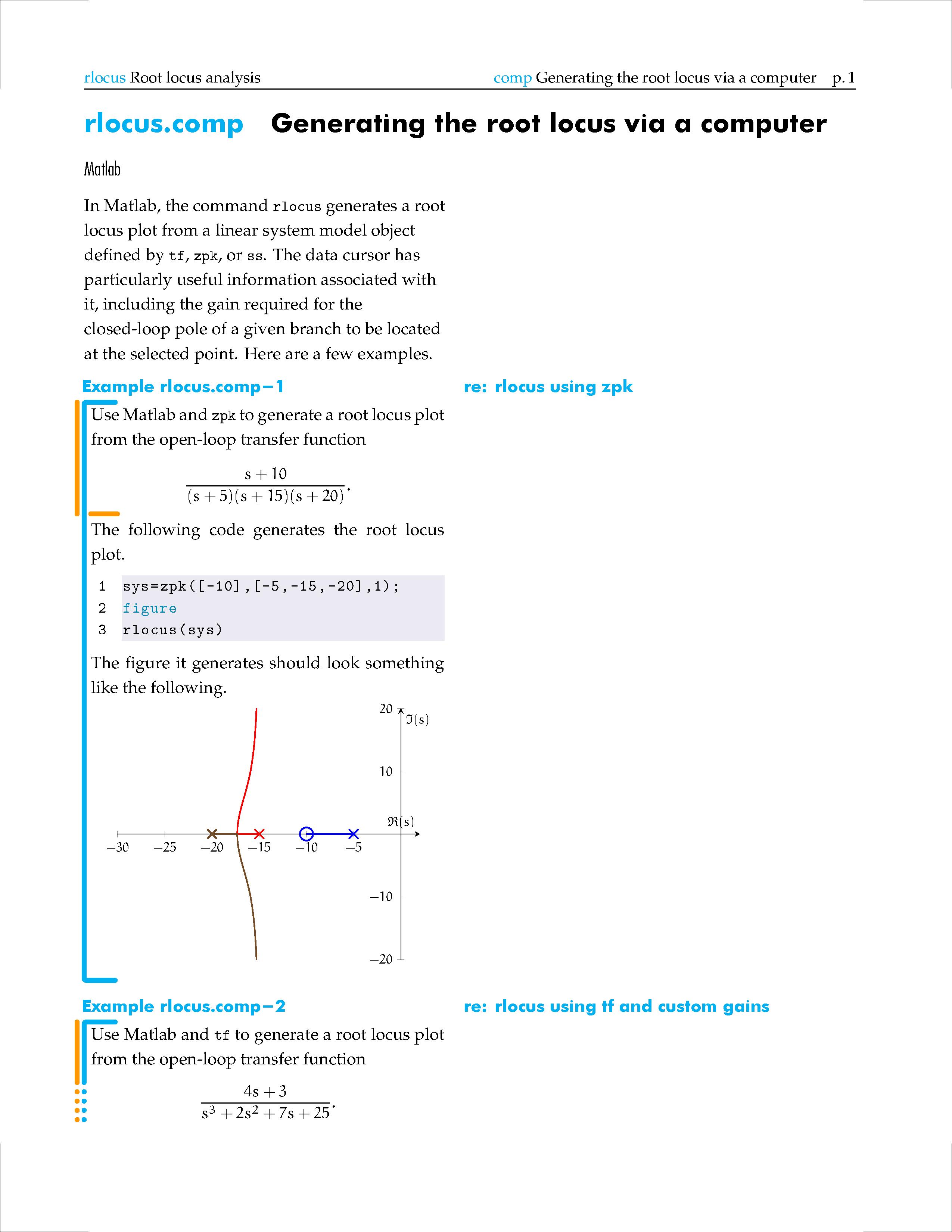 rlocus.comp Generating the root locus via a computer
rlocus.comp Generating the root locus via a computer
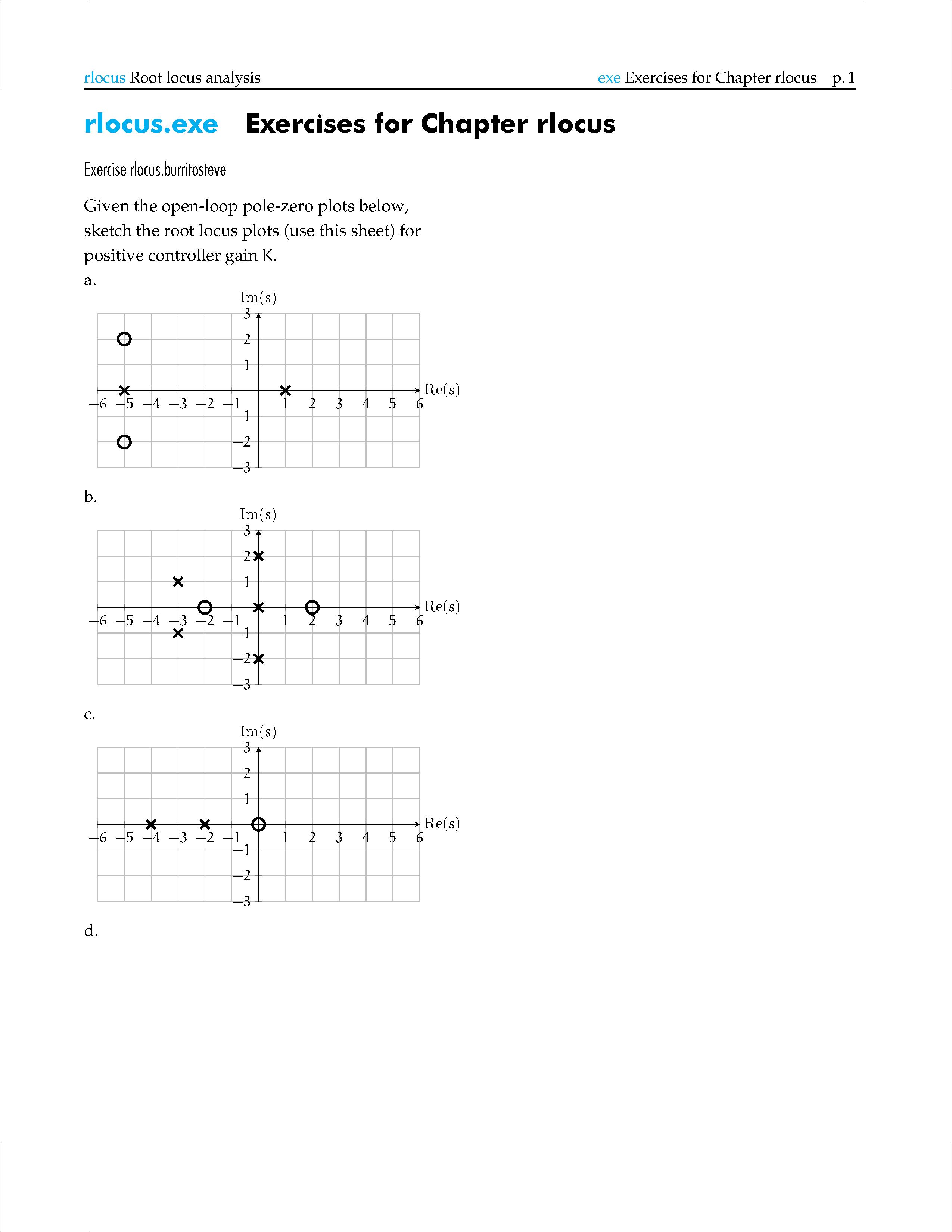 rlocus.exe Exercises for Chapter rlocus
rlocus.exe Exercises for Chapter rlocus
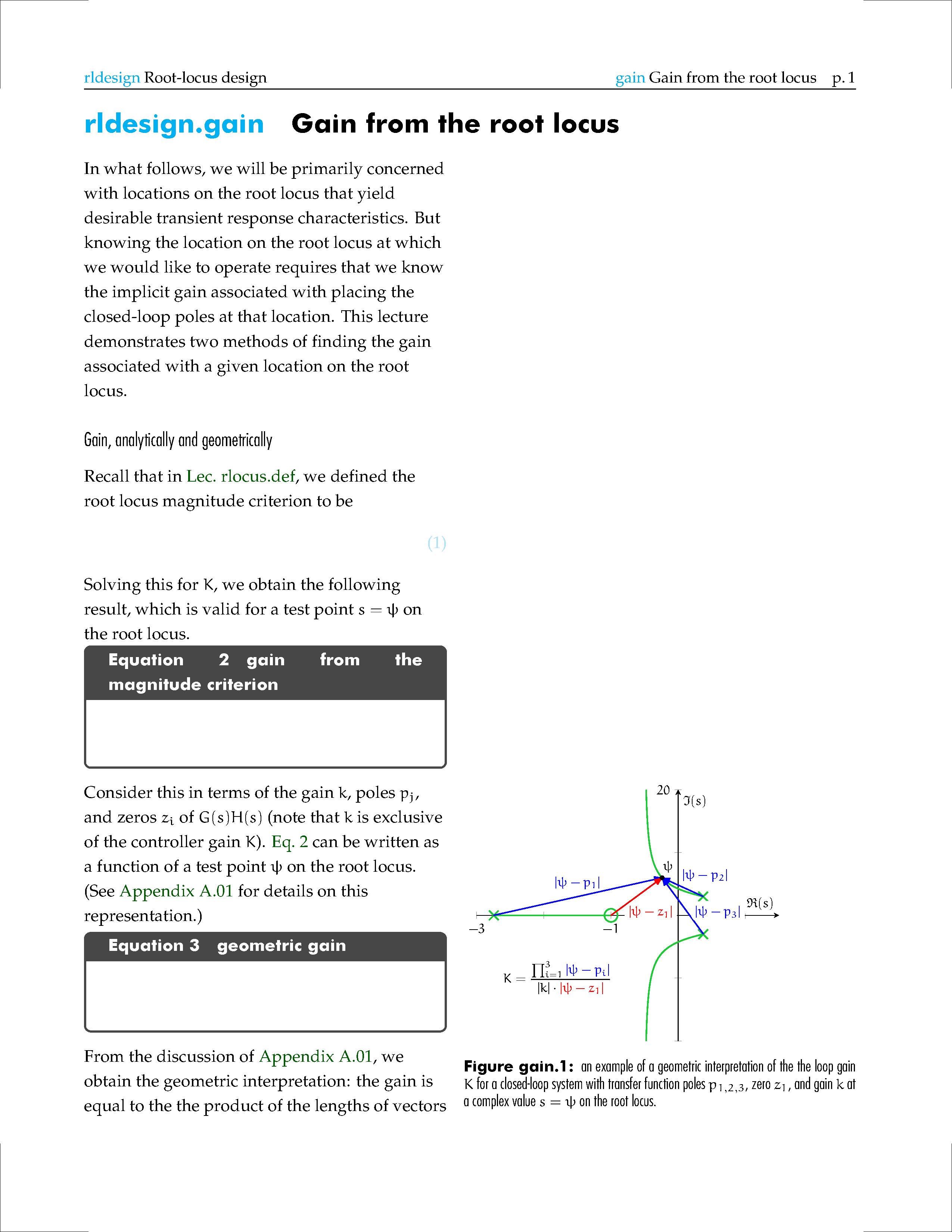 rldesign.gain Gain from the root locus
rldesign.gain Gain from the root locus
.jpg) rldesign.P Proportional controller design (P)
rldesign.P Proportional controller design (P)
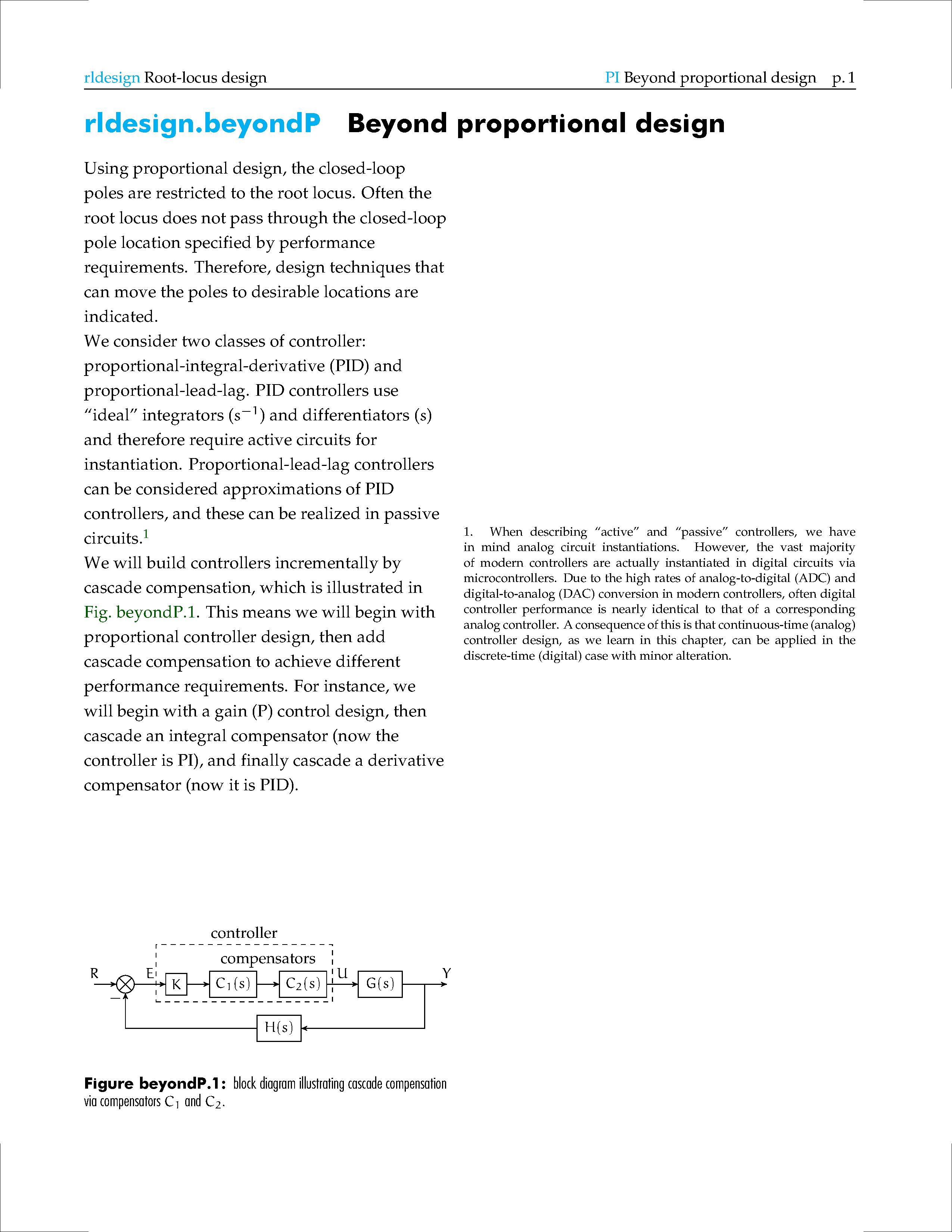 rldesign.beyondP Beyond proportional design
rldesign.beyondP Beyond proportional design
_controller_design.jpg) rldesign.PI Proportional-integral (PI) controller design
rldesign.PI Proportional-integral (PI) controller design
 rldesign.PLag Proportional-lag controller design
rldesign.PLag Proportional-lag controller design
_controller_design.jpg) rldesign.PD Proportional-derivative (PD) controller design
rldesign.PD Proportional-derivative (PD) controller design
 rldesign.PLead Proportional-lead design
rldesign.PLead Proportional-lead design
 rldesign.PID Prop-integral-derivative controller design
rldesign.PID Prop-integral-derivative controller design
 rldesign.PLeLa Proportional-lead-lag controller design
rldesign.PLeLa Proportional-lead-lag controller design
 rldesign.multd Multiple derivative compensators
rldesign.multd Multiple derivative compensators
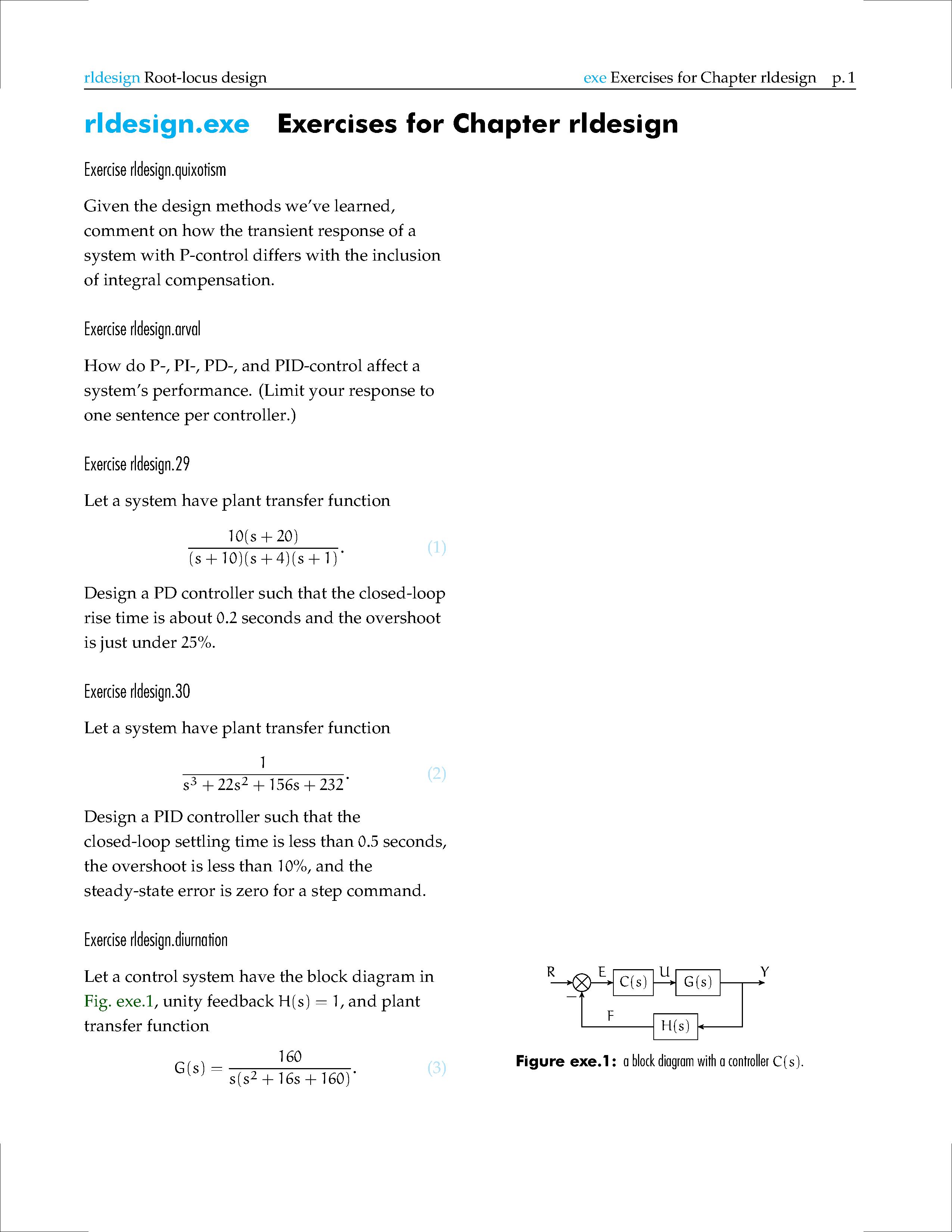
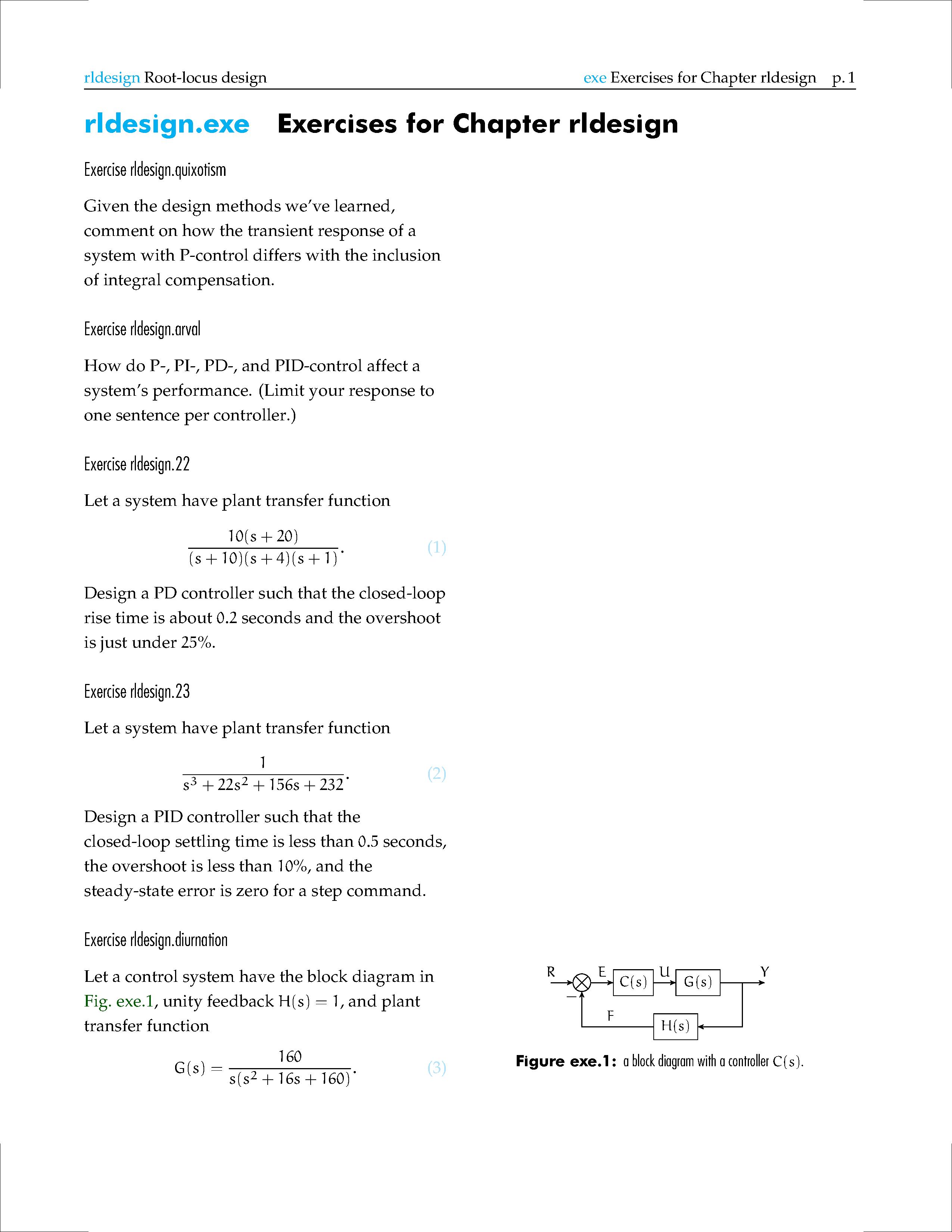 rldesign.exe Exercises for Chapter rldesign
rldesign.exe Exercises for Chapter rldesign
 rldesign.exe Exercises for Chapter rldesign
rldesign.exe Exercises for Chapter rldesign
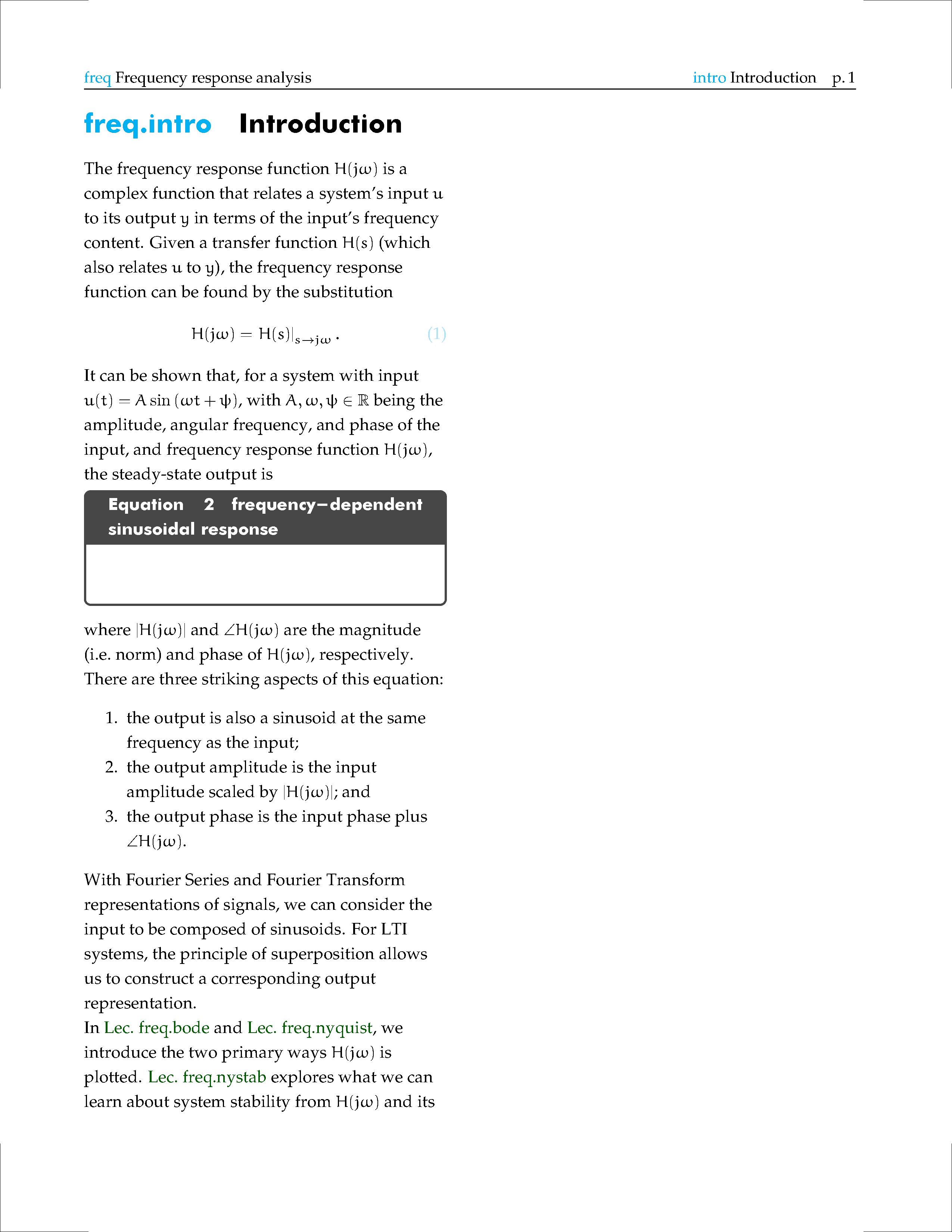 freq.intro Introduction
freq.intro Introduction
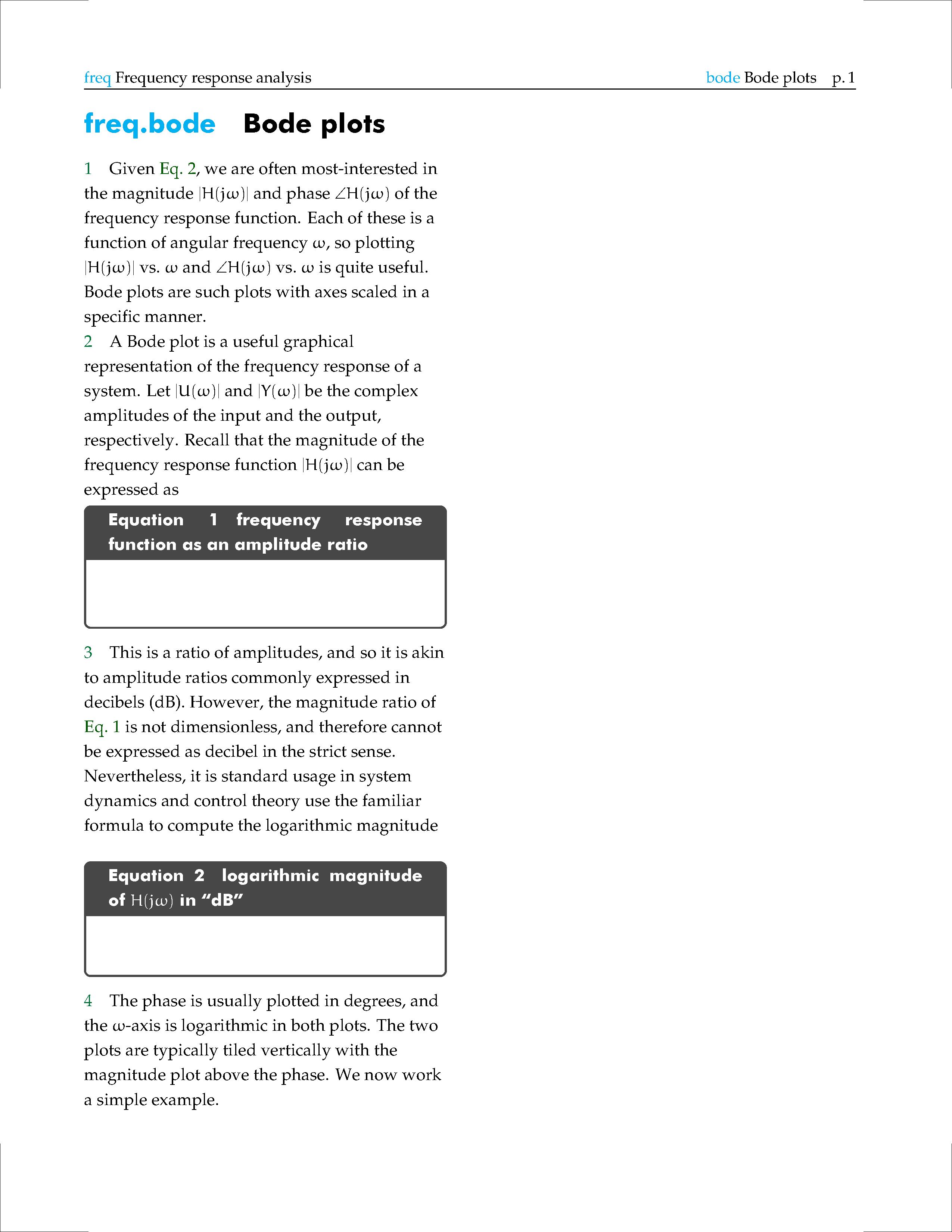 freq.bode Bode plots
freq.bode Bode plots
![]() freq.bodesimp Bode plots for simple transfer functions
freq.bodesimp Bode plots for simple transfer functions
 freq.bodesketch Sketching Bode plots
freq.bodesketch Sketching Bode plots
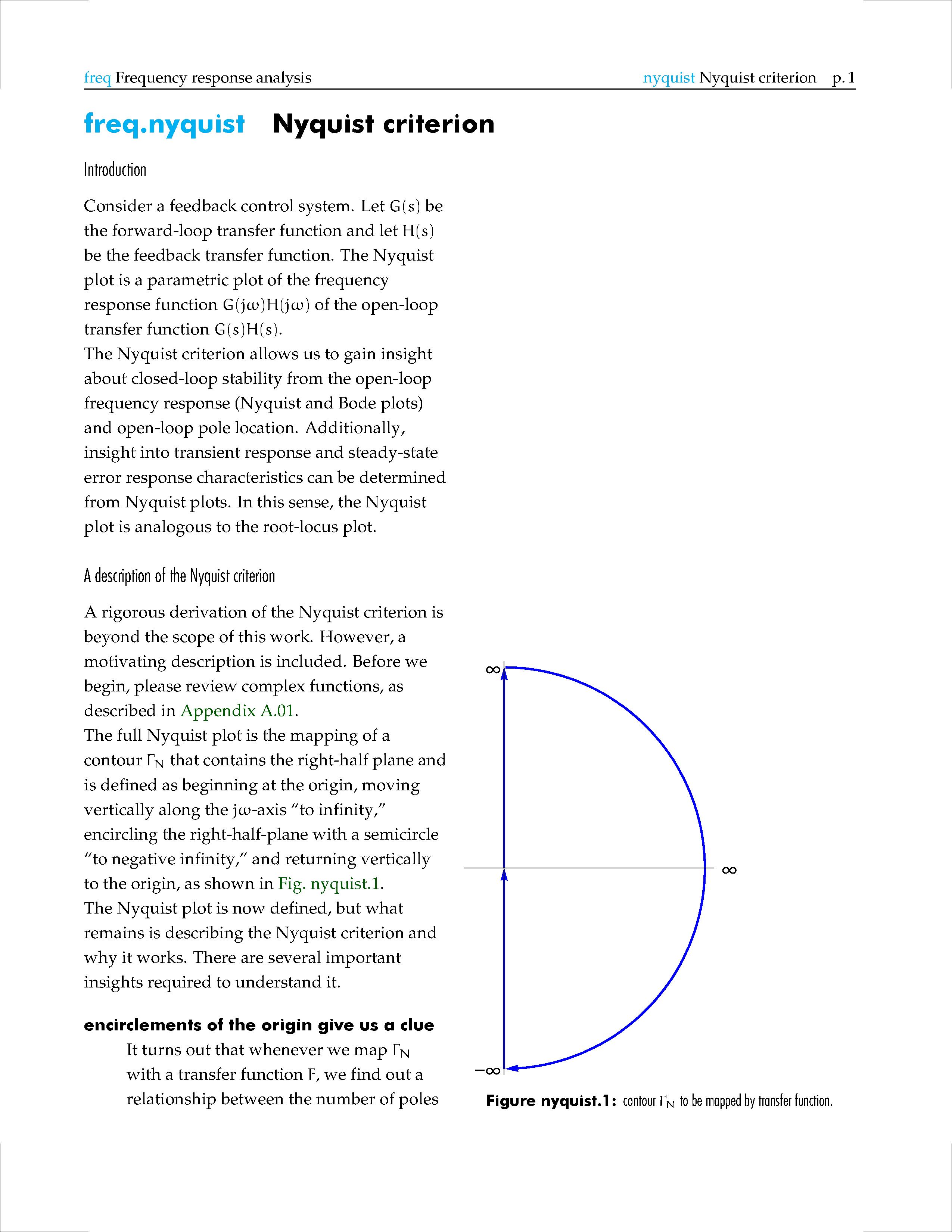 freq.nyquist Nyquist criterion
freq.nyquist Nyquist criterion
 freq.nystab Stability from the Nyquist plot
freq.nystab Stability from the Nyquist plot
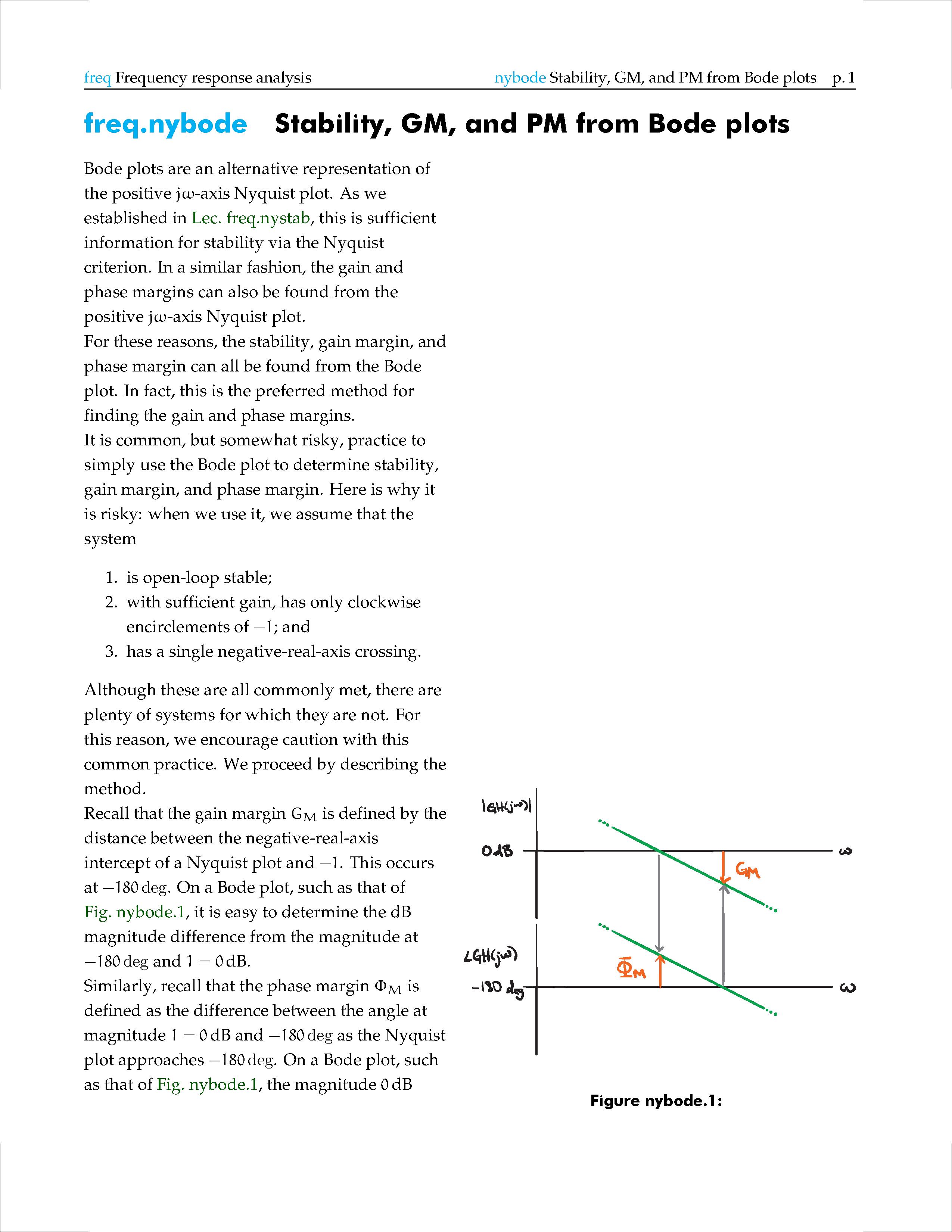 freq.nybode Stability GM and PM from Bode plots
freq.nybode Stability GM and PM from Bode plots
 freq.freqtime Relations among time and frequency domain reps
freq.freqtime Relations among time and frequency domain reps
 freq.exe Exercises for Chapter freq
freq.exe Exercises for Chapter freq
![]() freqd.gain Transient response design by adjusting the gain
freqd.gain Transient response design by adjusting the gain
 freqd.exe Exercises for Chapter freqd
freqd.exe Exercises for Chapter freqd
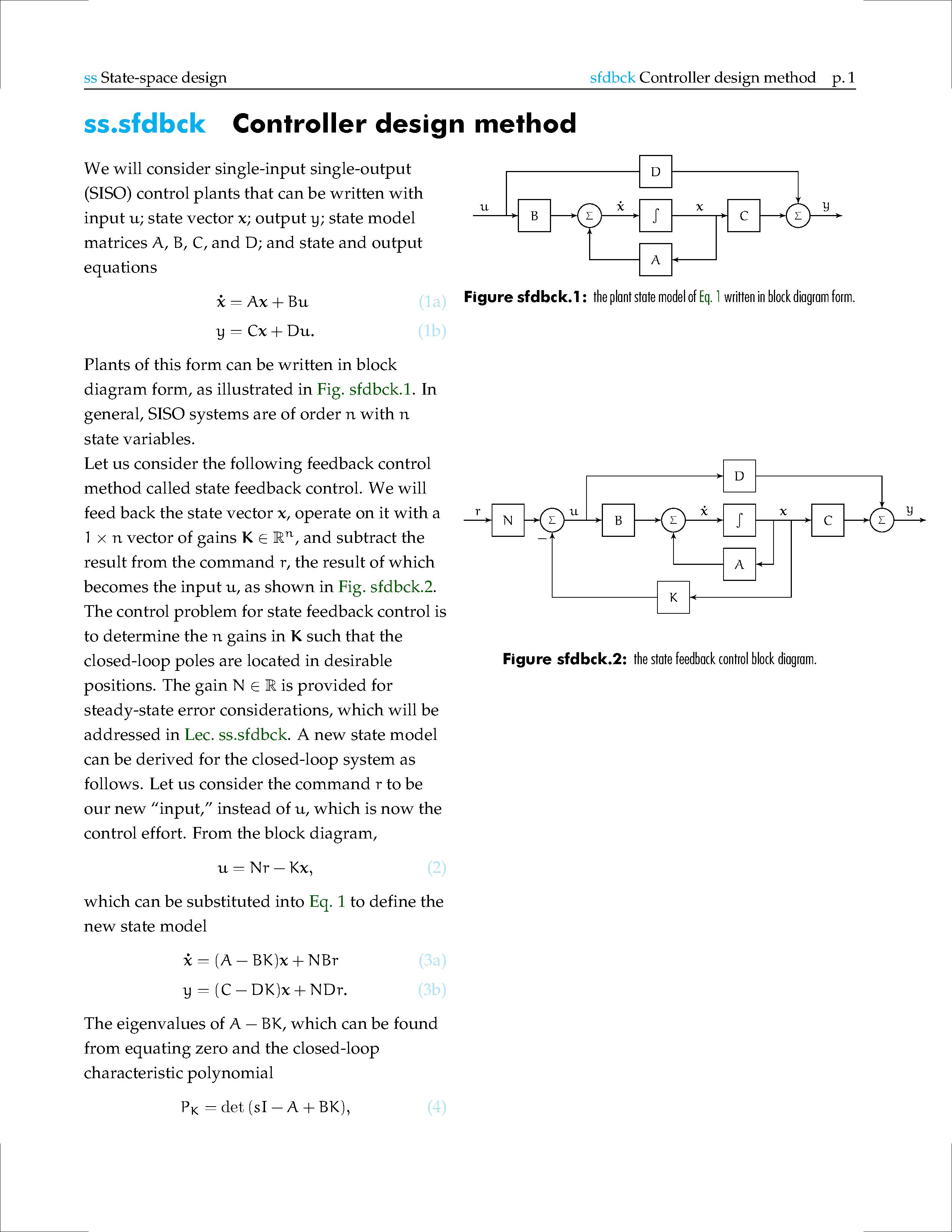 ss.sfdbck Controller design method
ss.sfdbck Controller design method
 ss.exe Exercises for Chapter ss
ss.exe Exercises for Chapter ss
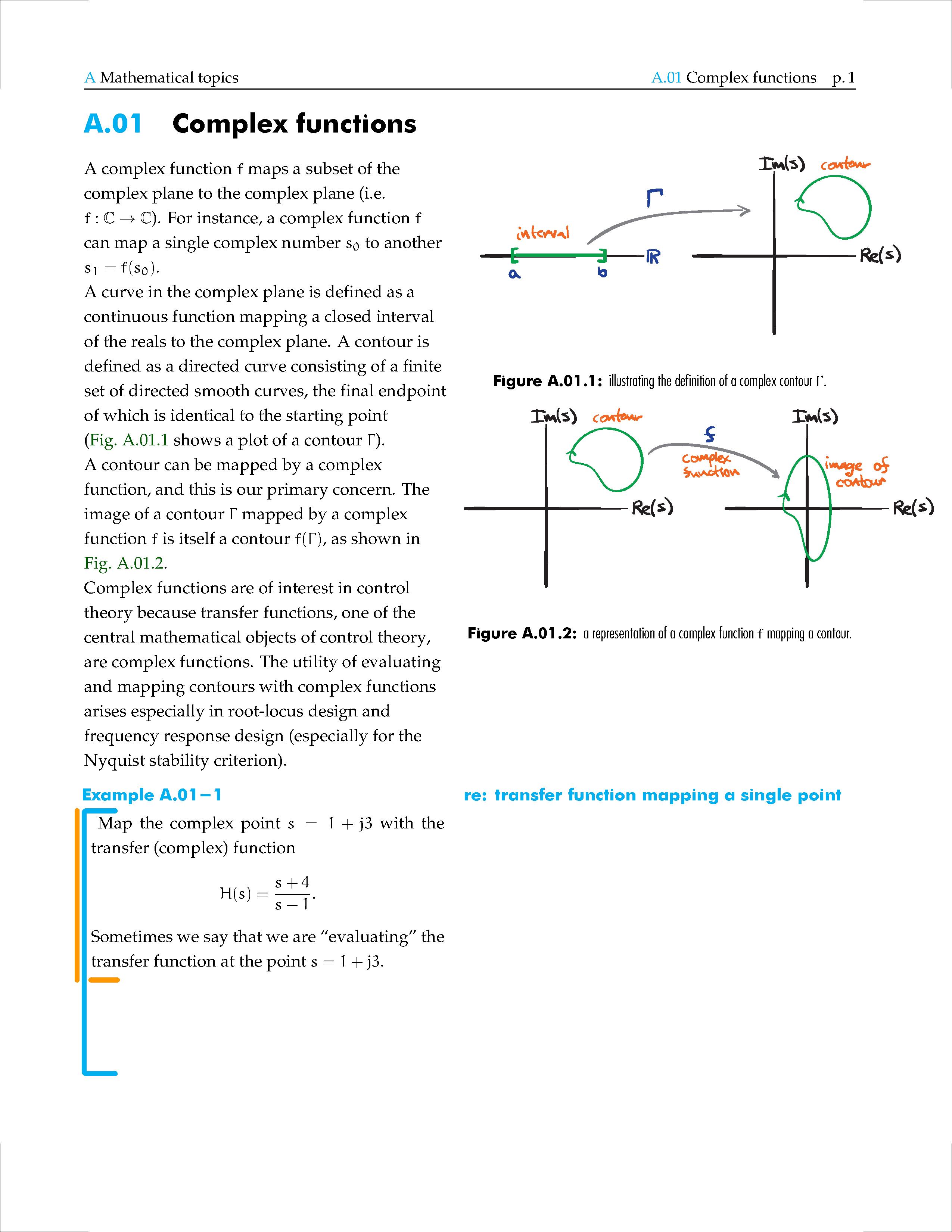 A.01 Complex functions
A.01 Complex functions
 B.01 Controllability observability and stabilizability
B.01 Controllability observability and stabilizability
 B.02 Canonical forms of the state model
B.02 Canonical forms of the state model
 C.01 Decibels
C.01 Decibels