Embedded Computing
This page contains fill-in notes on Embedded Computing lectures for the course ME 477.
These notes were originally written by Dr. Joseph Garbini and Dr. Rico Picone and the master copy is available at the link. This copy may have changes from the last time I taught a course which used this material, but may also be out of date.
Full Text

Individual lecture files
 00.1 Introduction to embedded computing
00.1 Introduction to embedded computing
 00.2 Embedded control of mechanical systems
00.2 Embedded control of mechanical systems
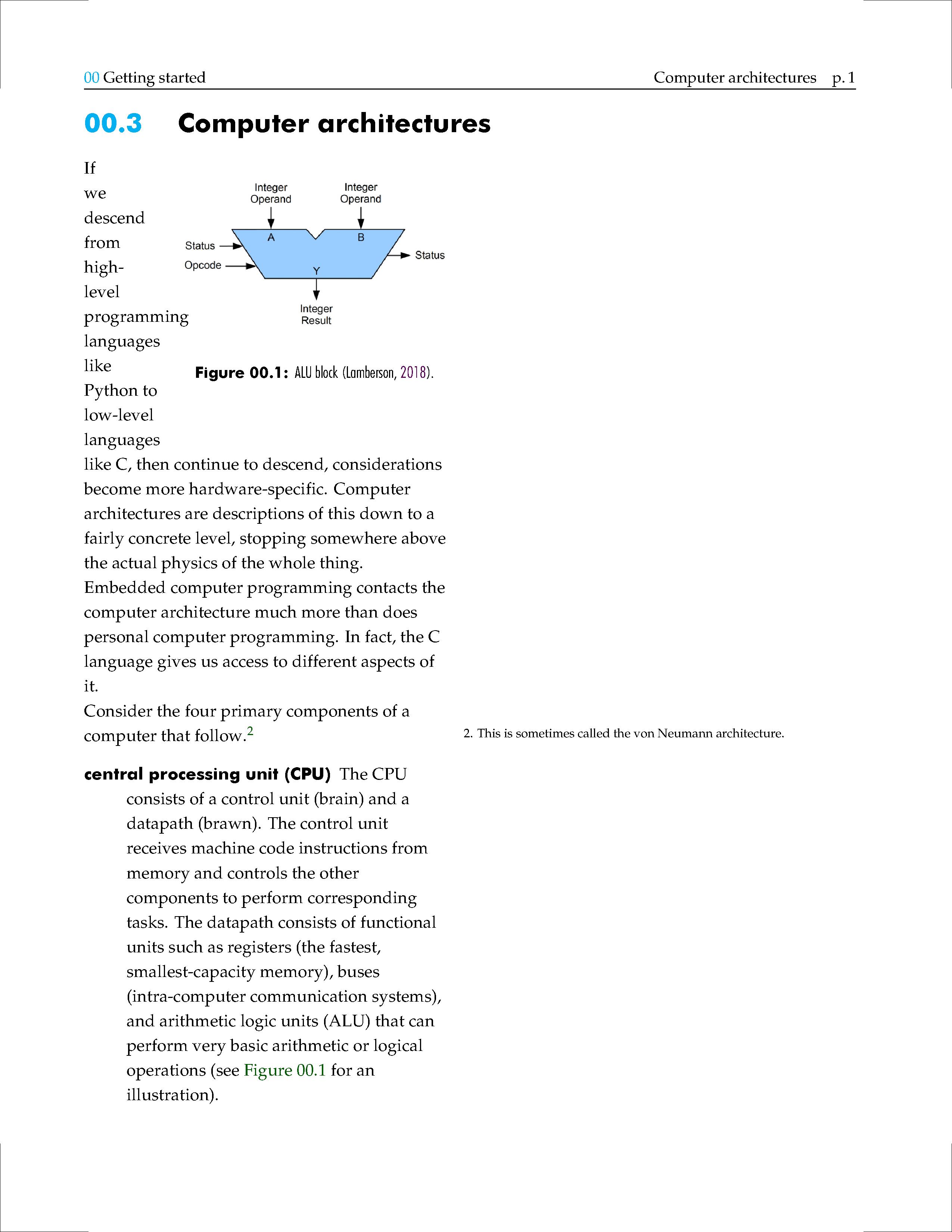 00.3 Computer architectures
00.3 Computer architectures
 00.4 Numeral systems
00.4 Numeral systems
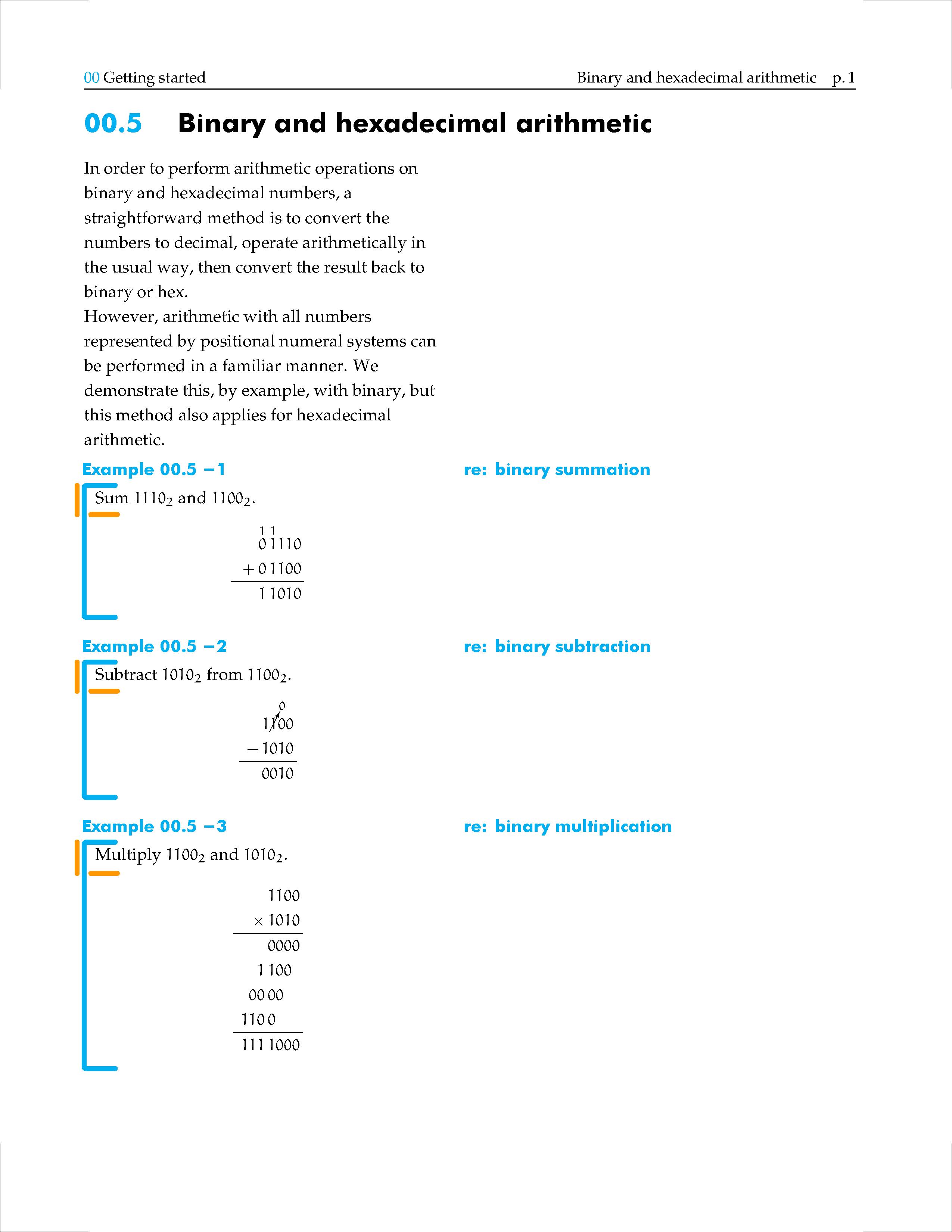 00.5 Binary and hexadecimal arithmetic
00.5 Binary and hexadecimal arithmetic
 00.6 Exploring C building a sandbox
00.6 Exploring C building a sandbox
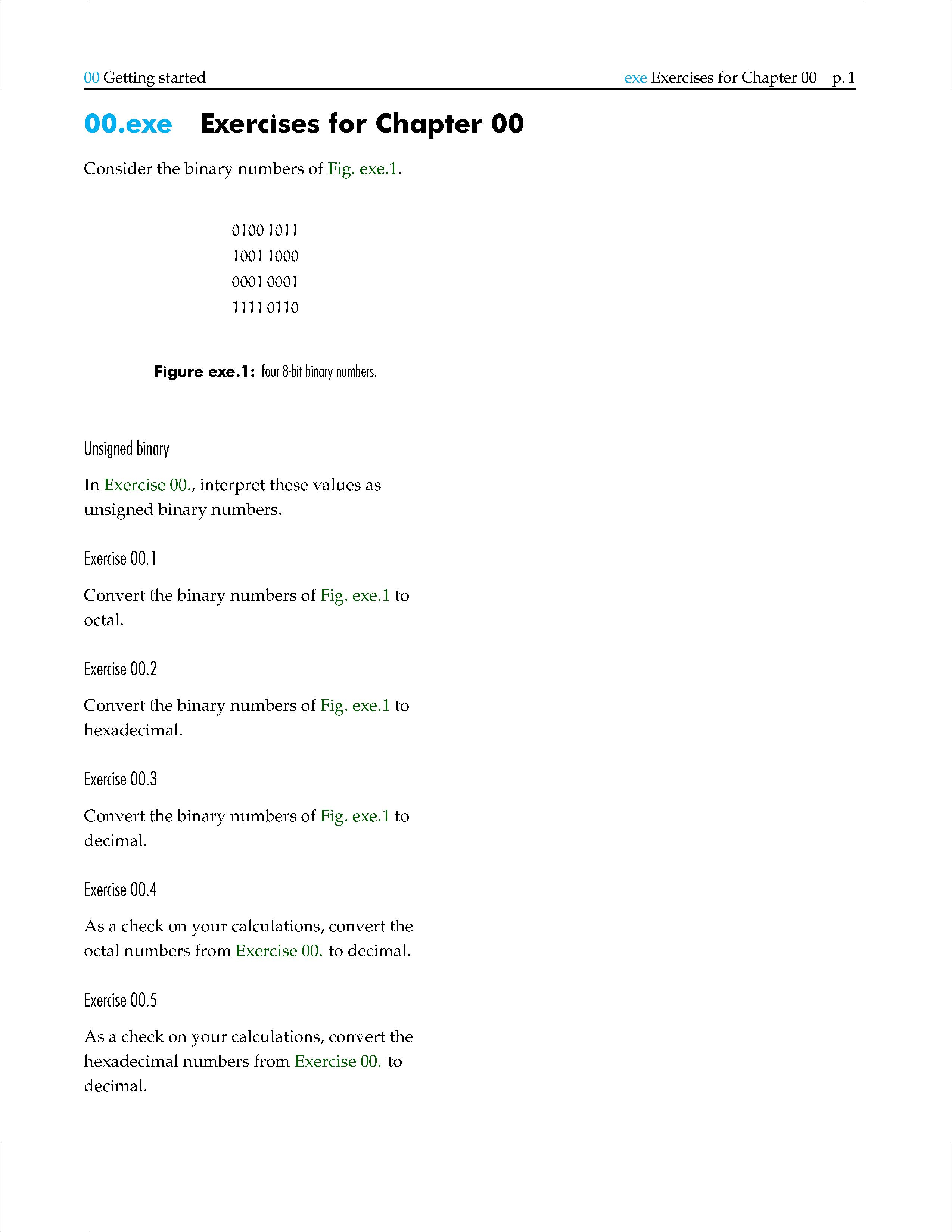 00.exe Exercises for Chapter 00
00.exe Exercises for Chapter 00
 00.L Lab Exercise Getting started
00.L Lab Exercise Getting started
 01.1 Memory
01.1 Memory
 01.2 Processing
01.2 Processing
 01.3 A CPU programming model
01.3 A CPU programming model
 01.exe Exercises for Chapter 01
01.exe Exercises for Chapter 01
 01.L Lab Exercise Introduction to myRIO C programming and high-level io drivers
01.L Lab Exercise Introduction to myRIO C programming and high-level io drivers
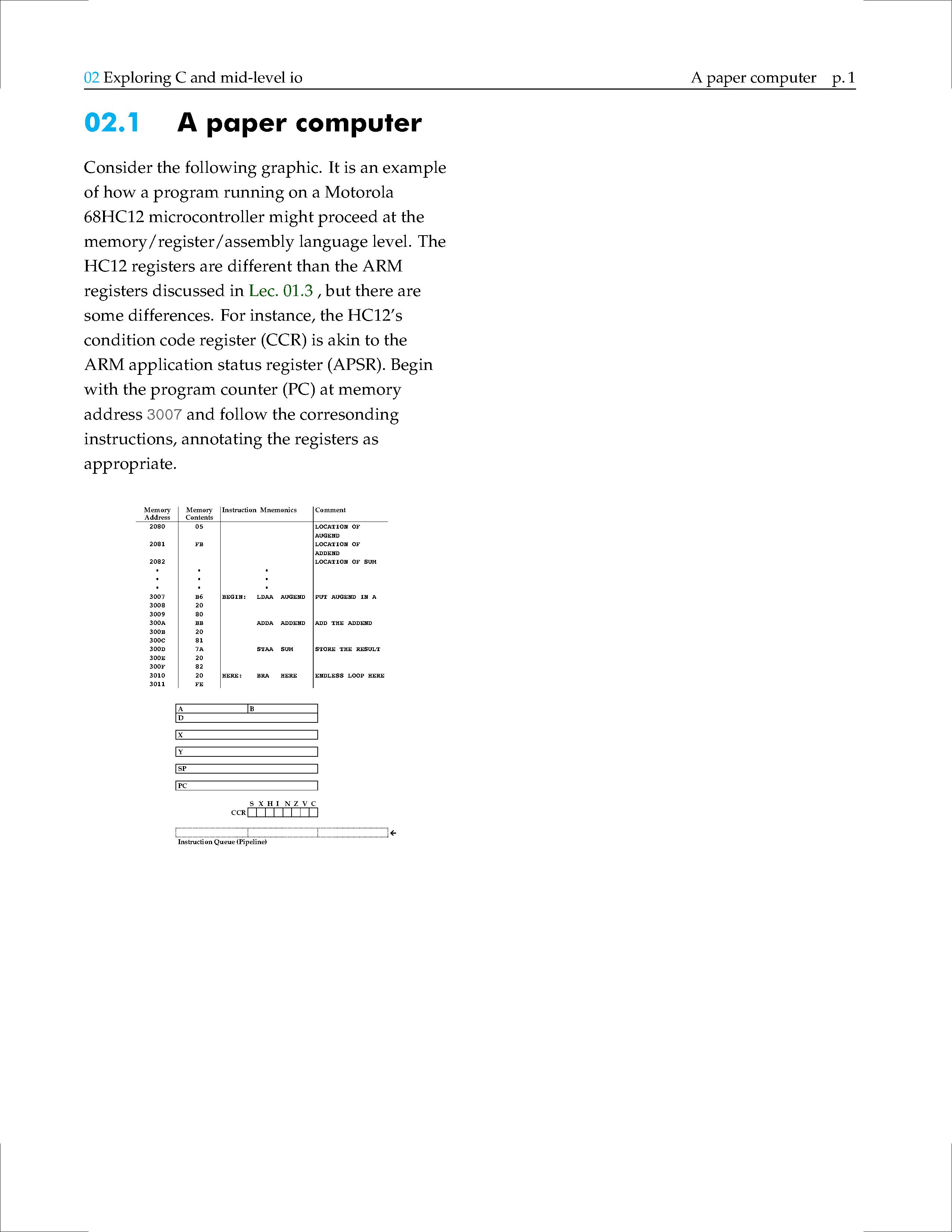 02.1 A paper computer
02.1 A paper computer
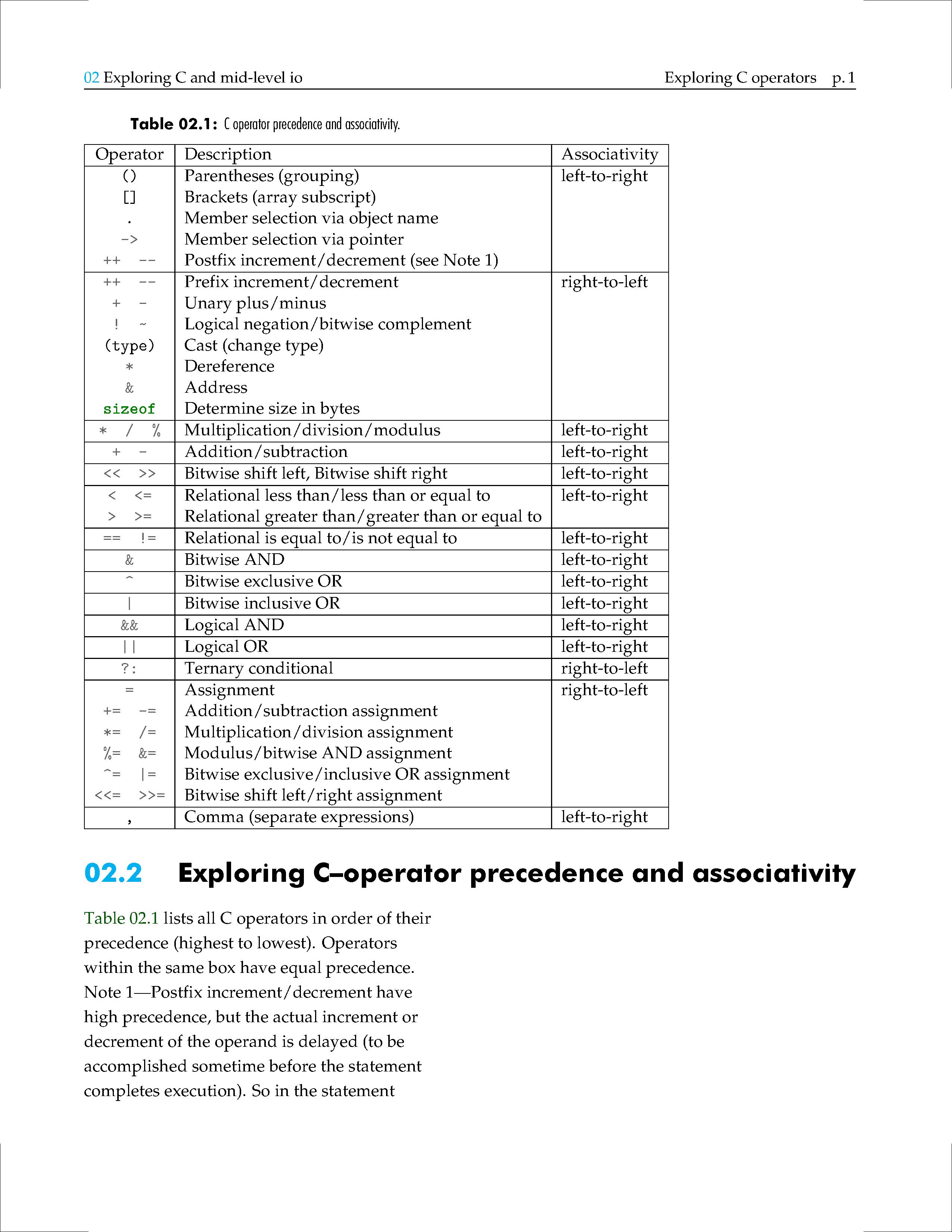 02.2 Exploring C operators
02.2 Exploring C operators
 02.3 Exploring C constants
02.3 Exploring C constants
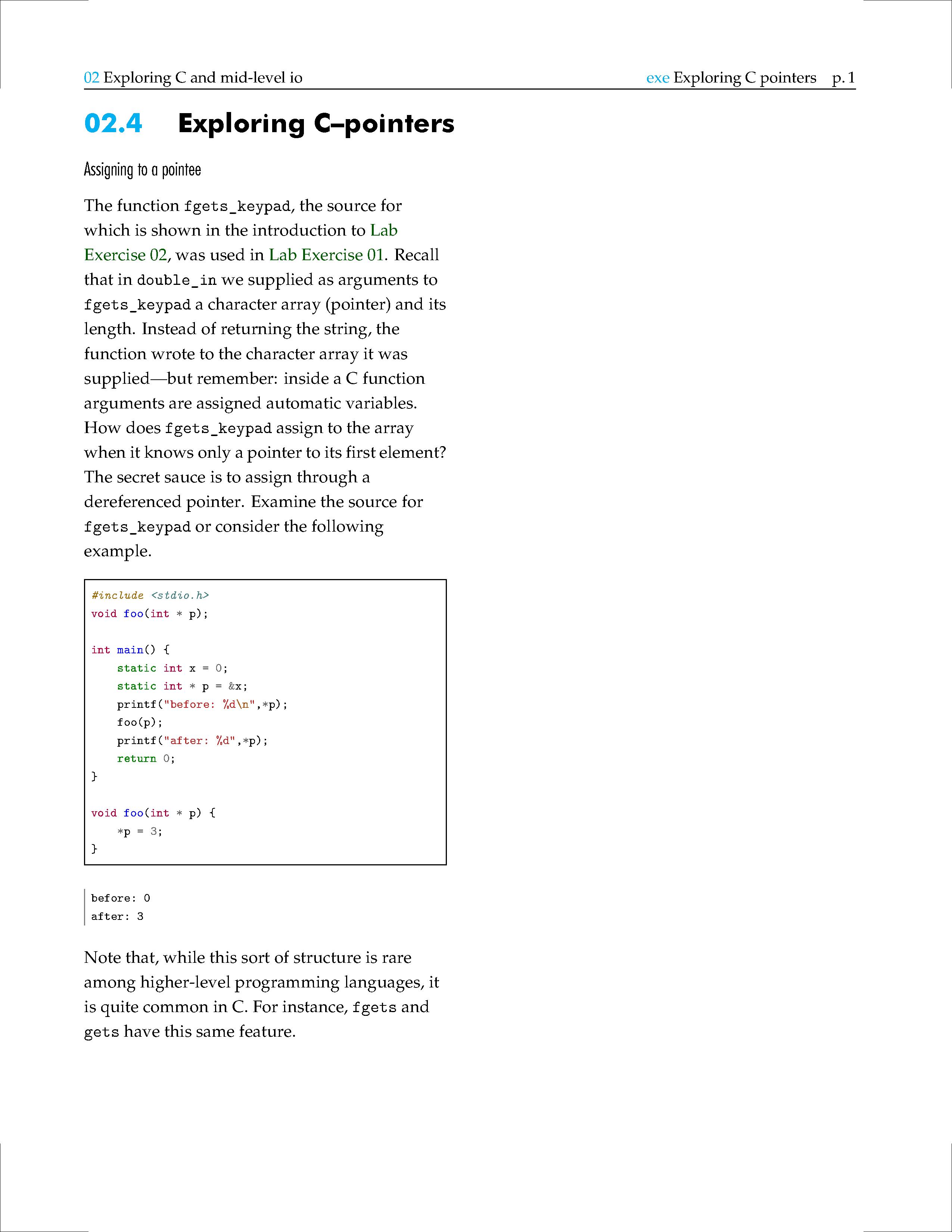 02.4 Exploring C pointers
02.4 Exploring C pointers
 02.exe Exercises for Chapter 02
02.exe Exercises for Chapter 02
 02.L Lab Exercise Keypad mid-level primitives
02.L Lab Exercise Keypad mid-level primitives
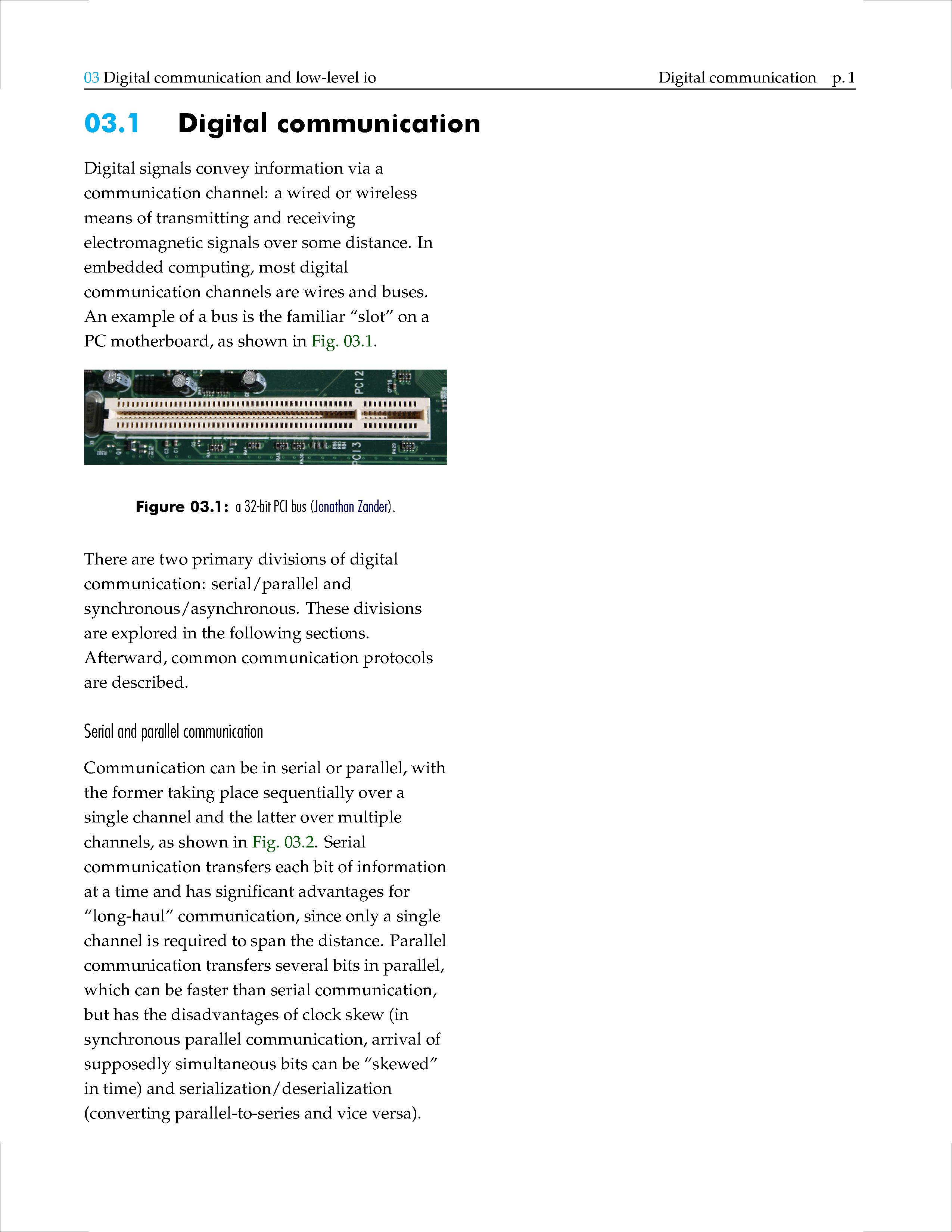 03.1 Digital communication
03.1 Digital communication
 03.2 UARTs
03.2 UARTs
 03.3 Digital signals
03.3 Digital signals
 03.4 Exploring C structures
03.4 Exploring C structures
 03.exe Exercises for Chapter 03
03.exe Exercises for Chapter 03
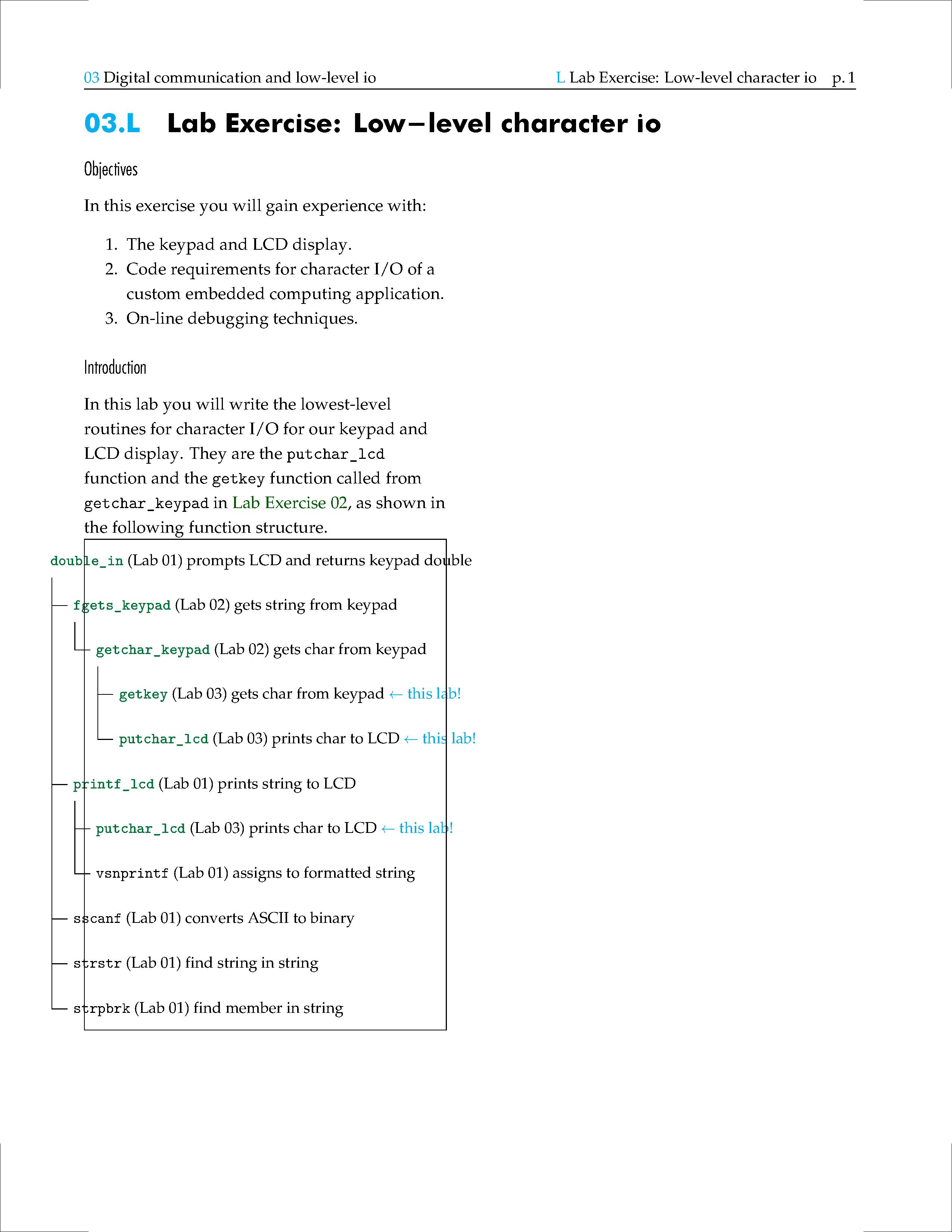 03.L Lab Exercise Low-level character io
03.L Lab Exercise Low-level character io
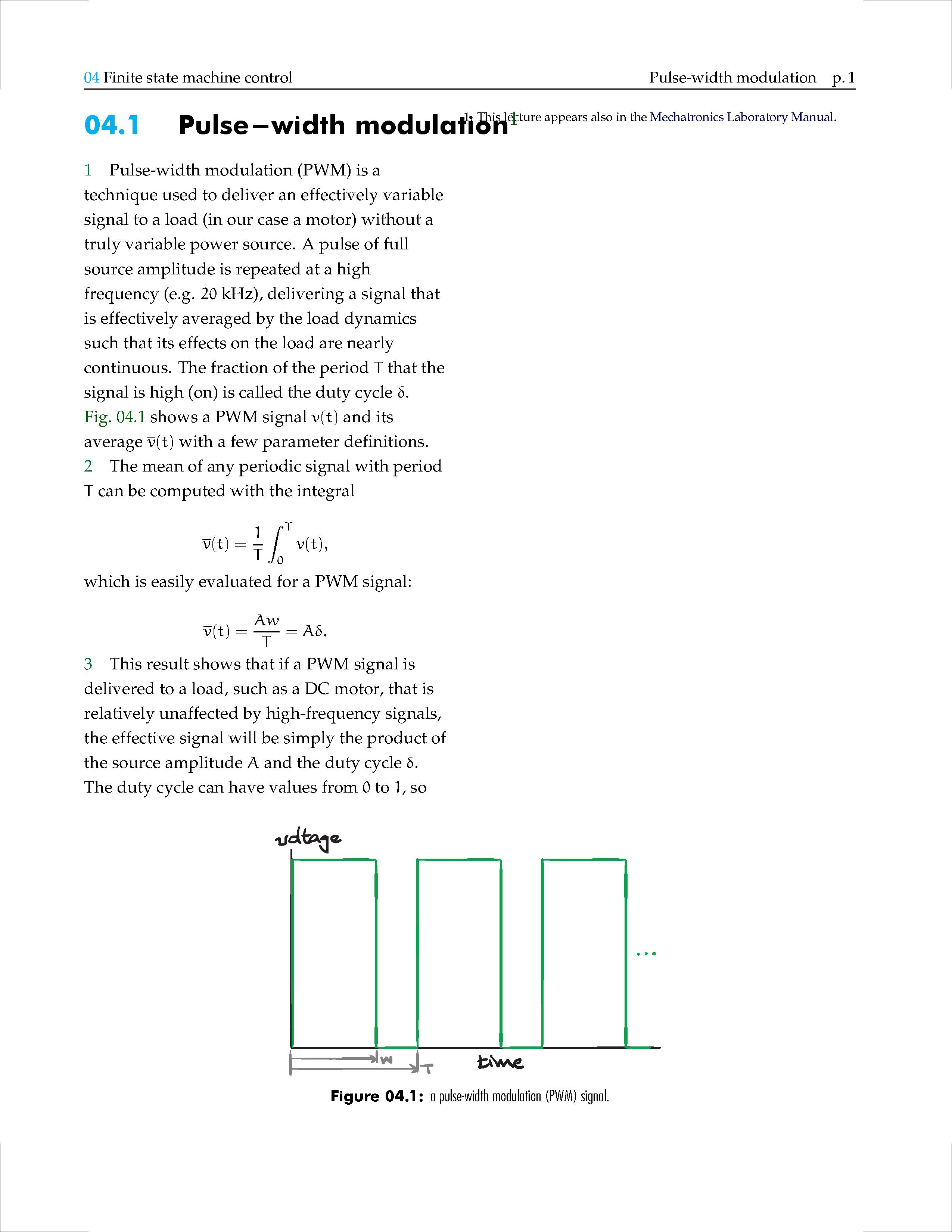 04.1 Pulse-width modulation
04.1 Pulse-width modulation
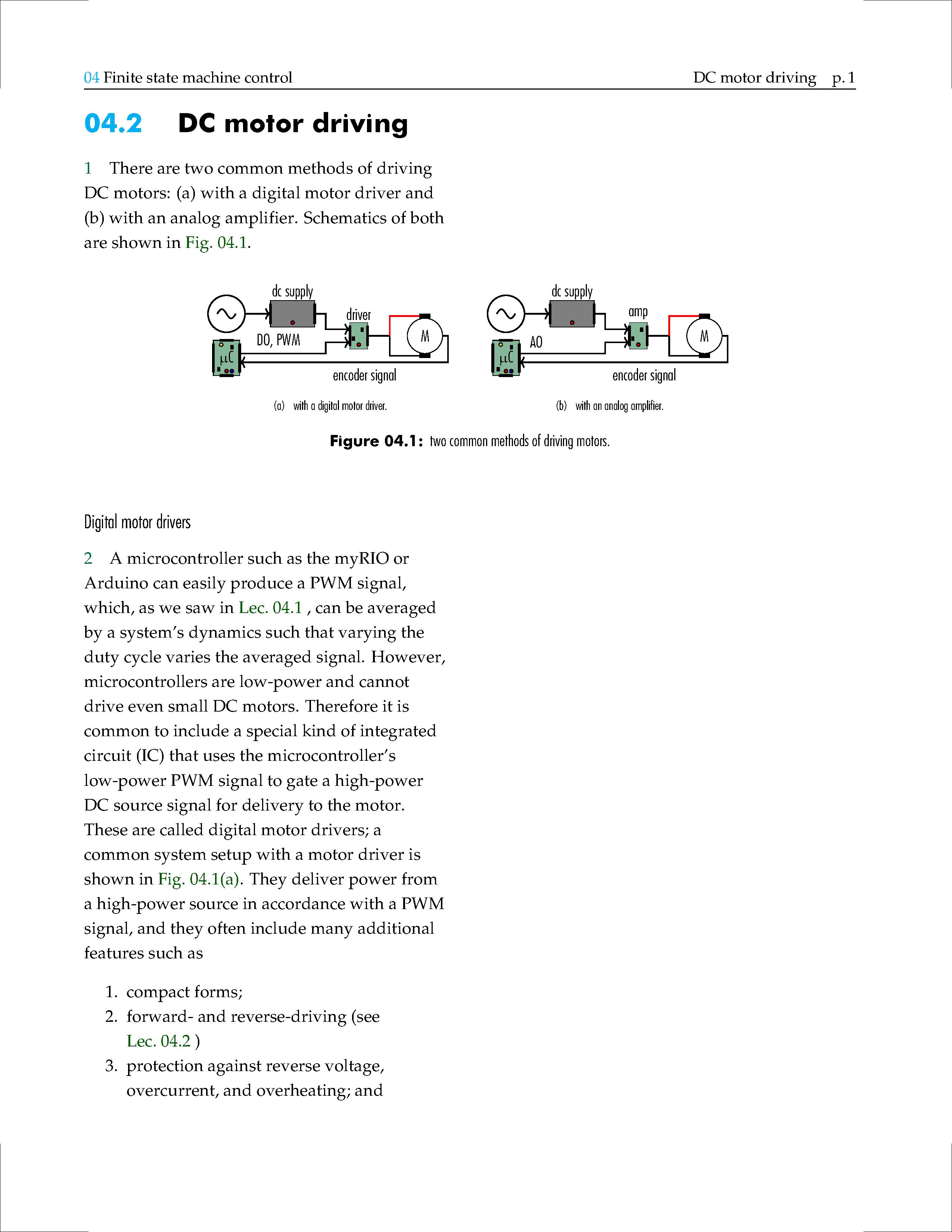 04.2 DC motor driving
04.2 DC motor driving
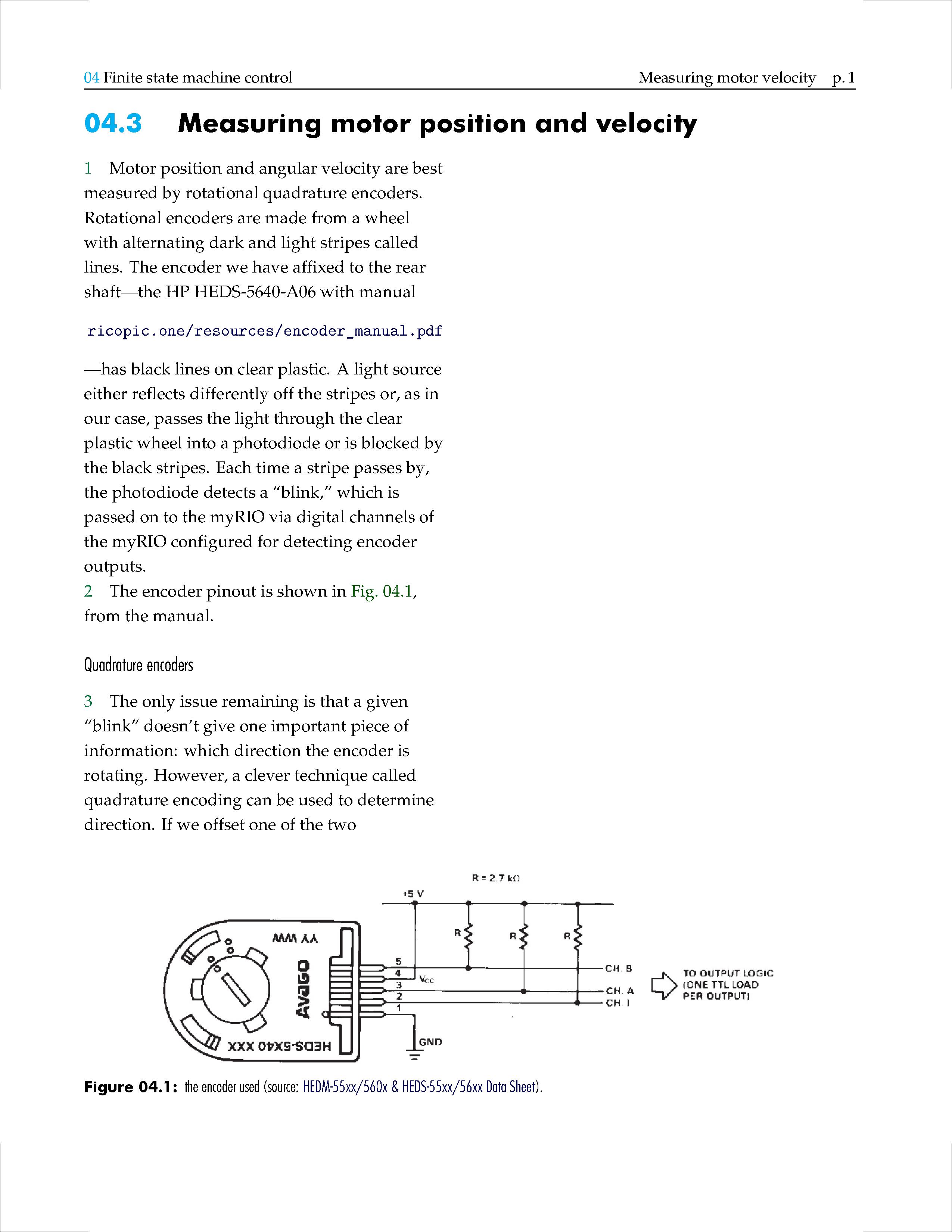 04.3 Measuring motor velocity
04.3 Measuring motor velocity
 04.4 Finite state machines
04.4 Finite state machines
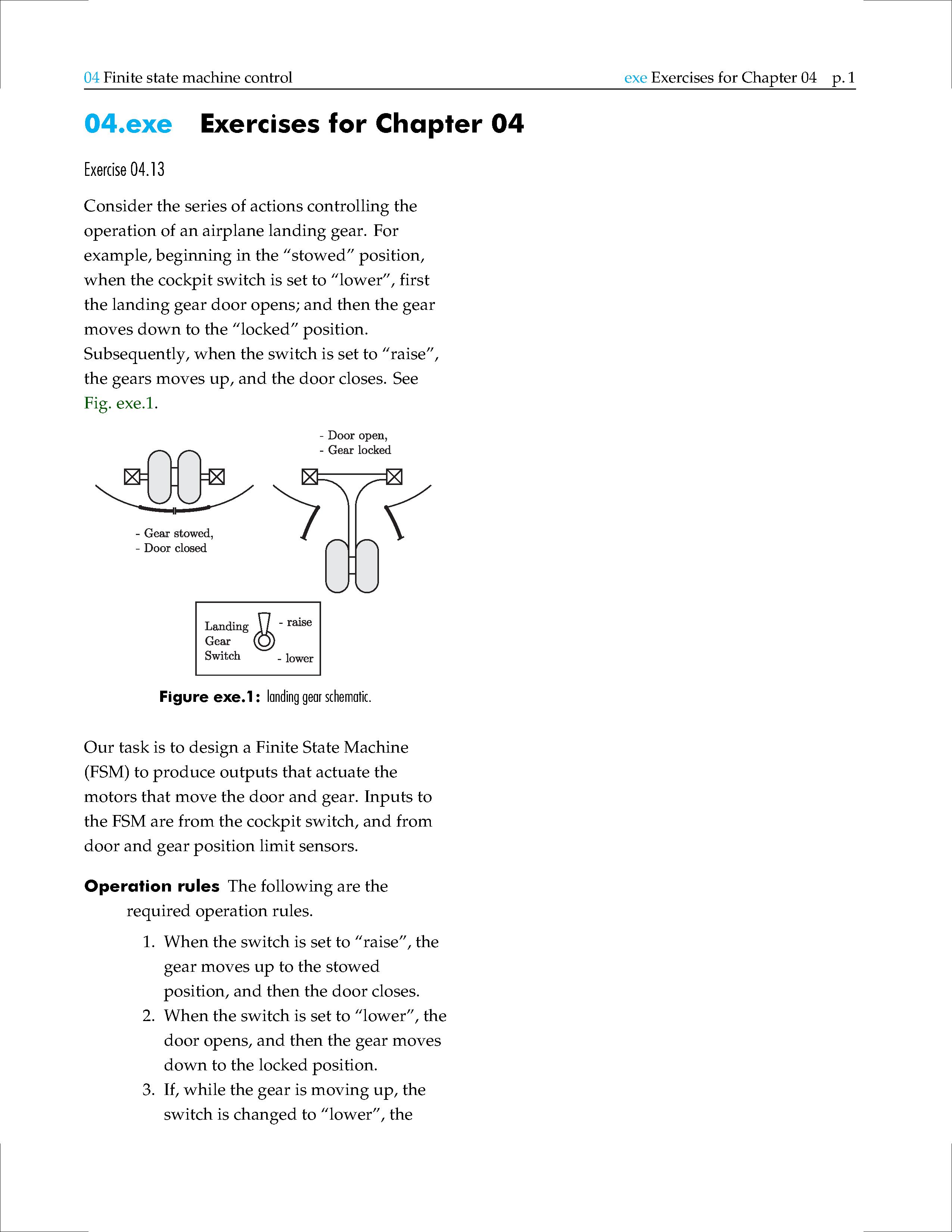 04.exe Exercises for Chapter 04
04.exe Exercises for Chapter 04
 04.L Lab Exercise Finite state machine motor control
04.L Lab Exercise Finite state machine motor control
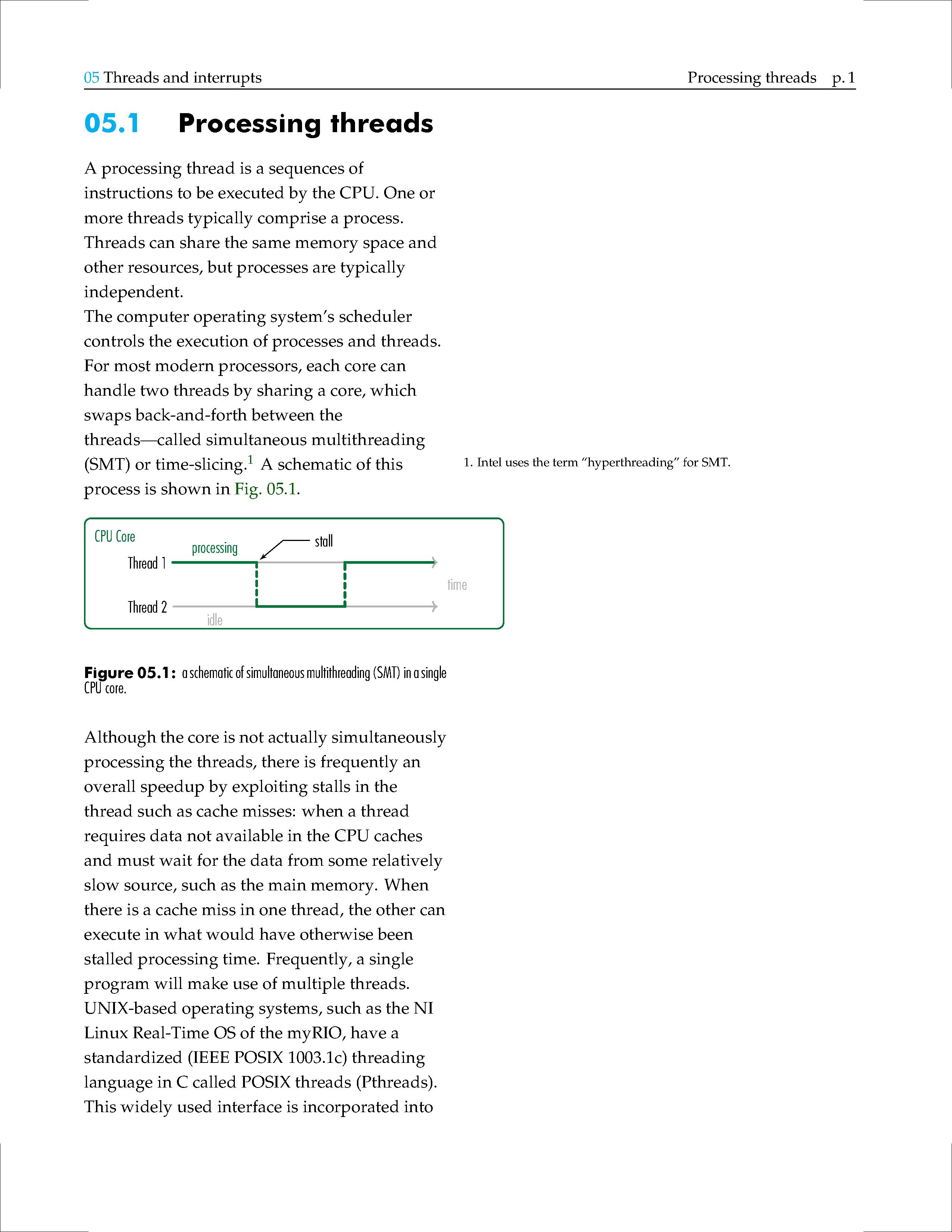 05.1 Processing threads
05.1 Processing threads
 05.2 Interrupts
05.2 Interrupts
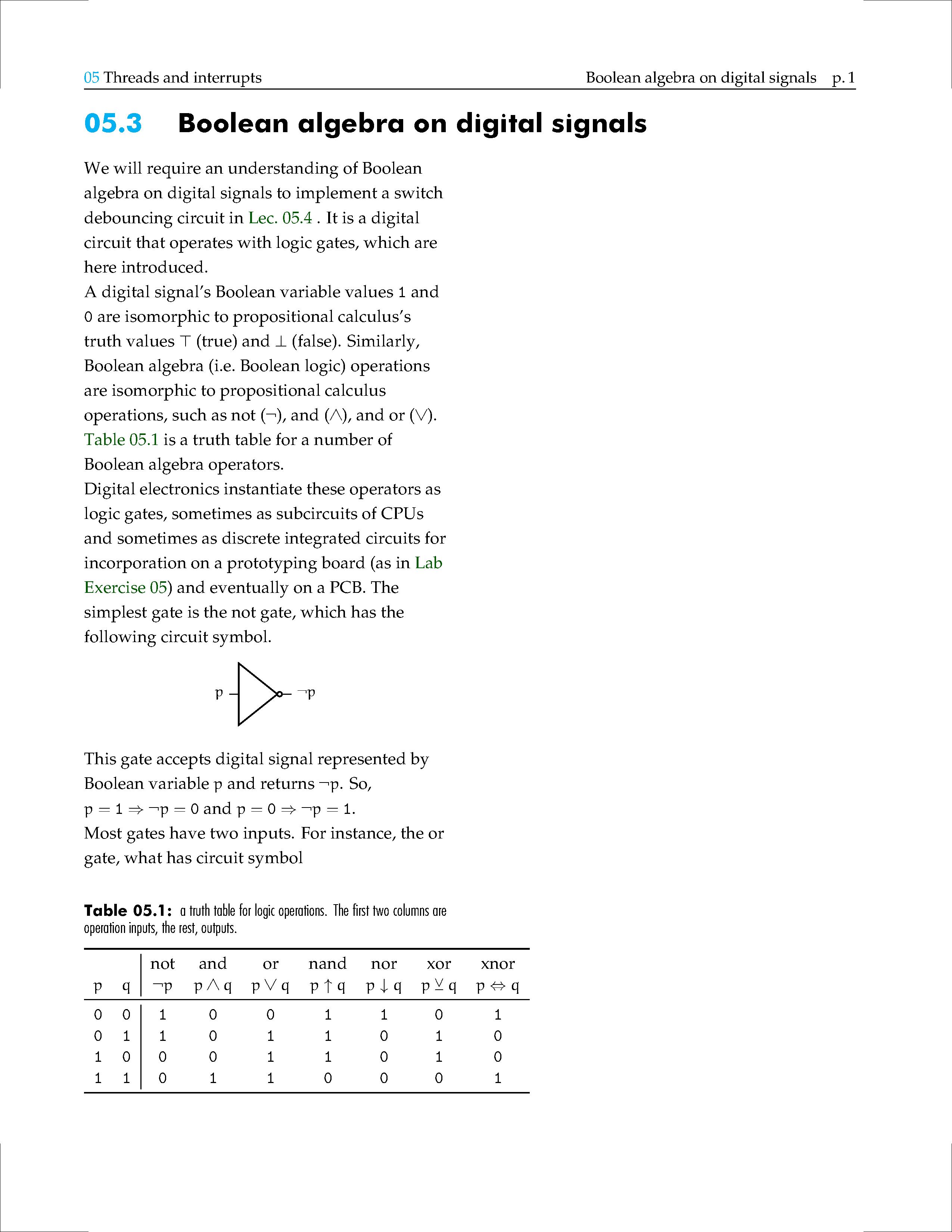 05.3 Boolean algebra on digital signals
05.3 Boolean algebra on digital signals
 05.4 Debouncing switches
05.4 Debouncing switches
 05.exe Exercises for Chapter 05
05.exe Exercises for Chapter 05
 05.L Lab Exercise Introduction to interrupts
05.L Lab Exercise Introduction to interrupts
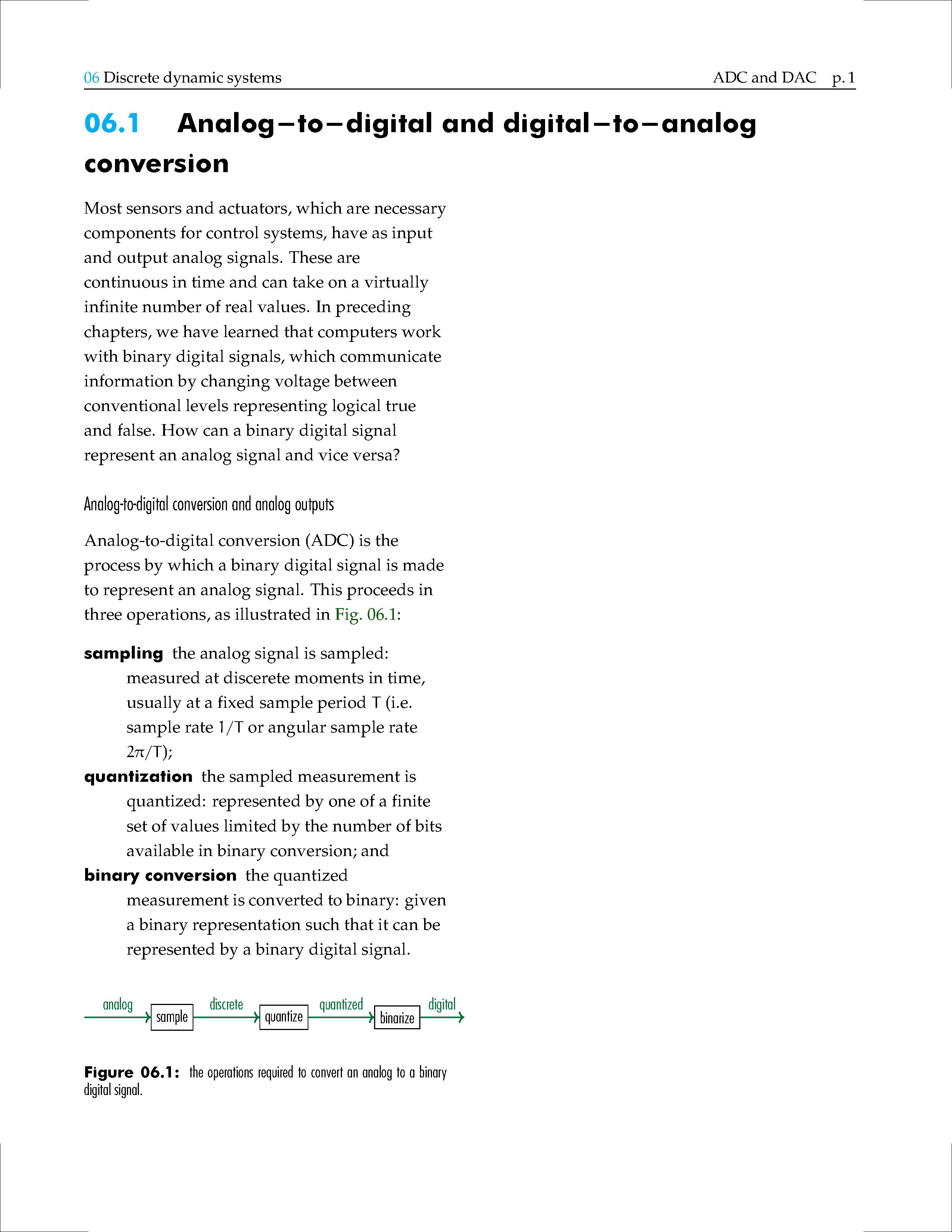 06.1 ADC and DAC
06.1 ADC and DAC
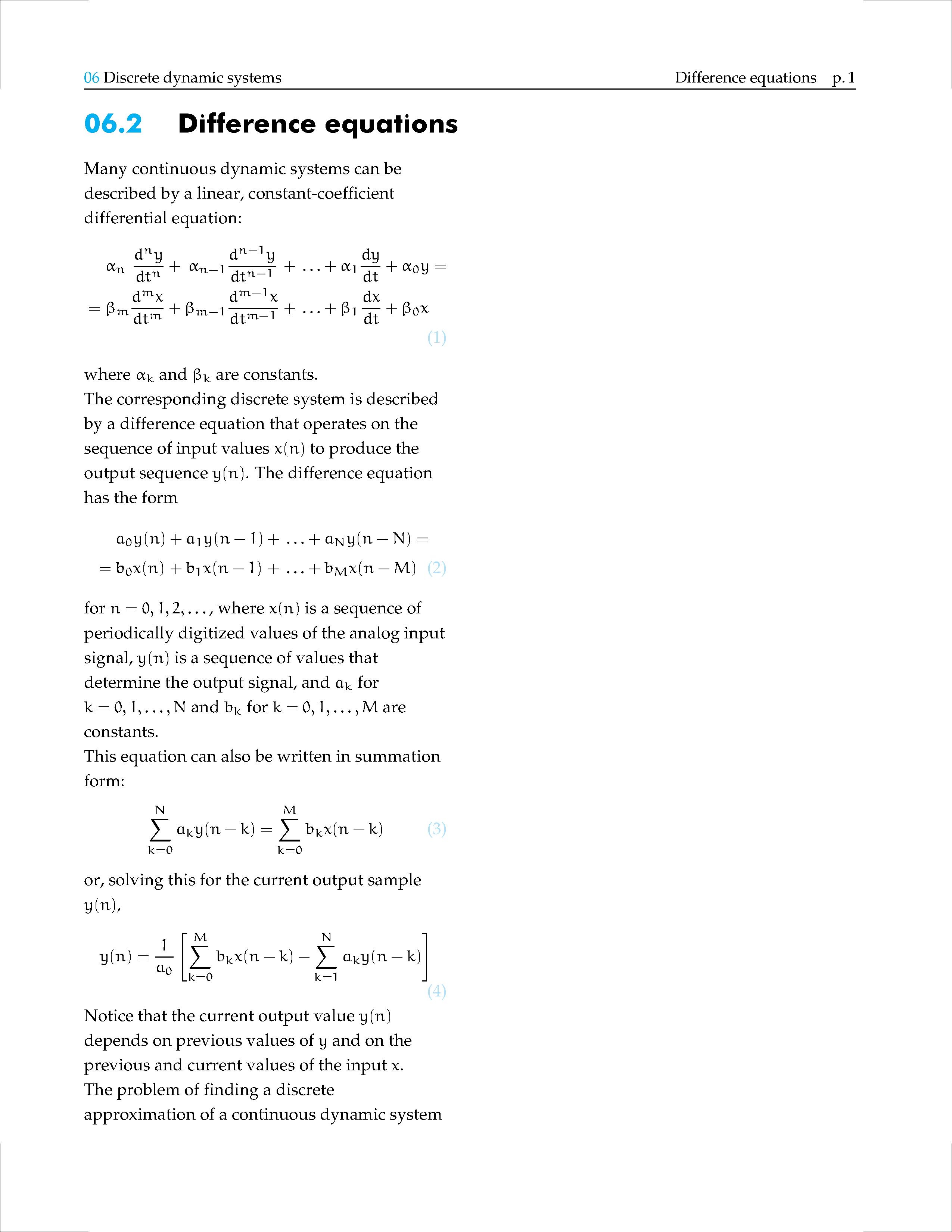 06.2 Difference equations
06.2 Difference equations
![]() 06.3 Discrete transfer functions
06.3 Discrete transfer functions
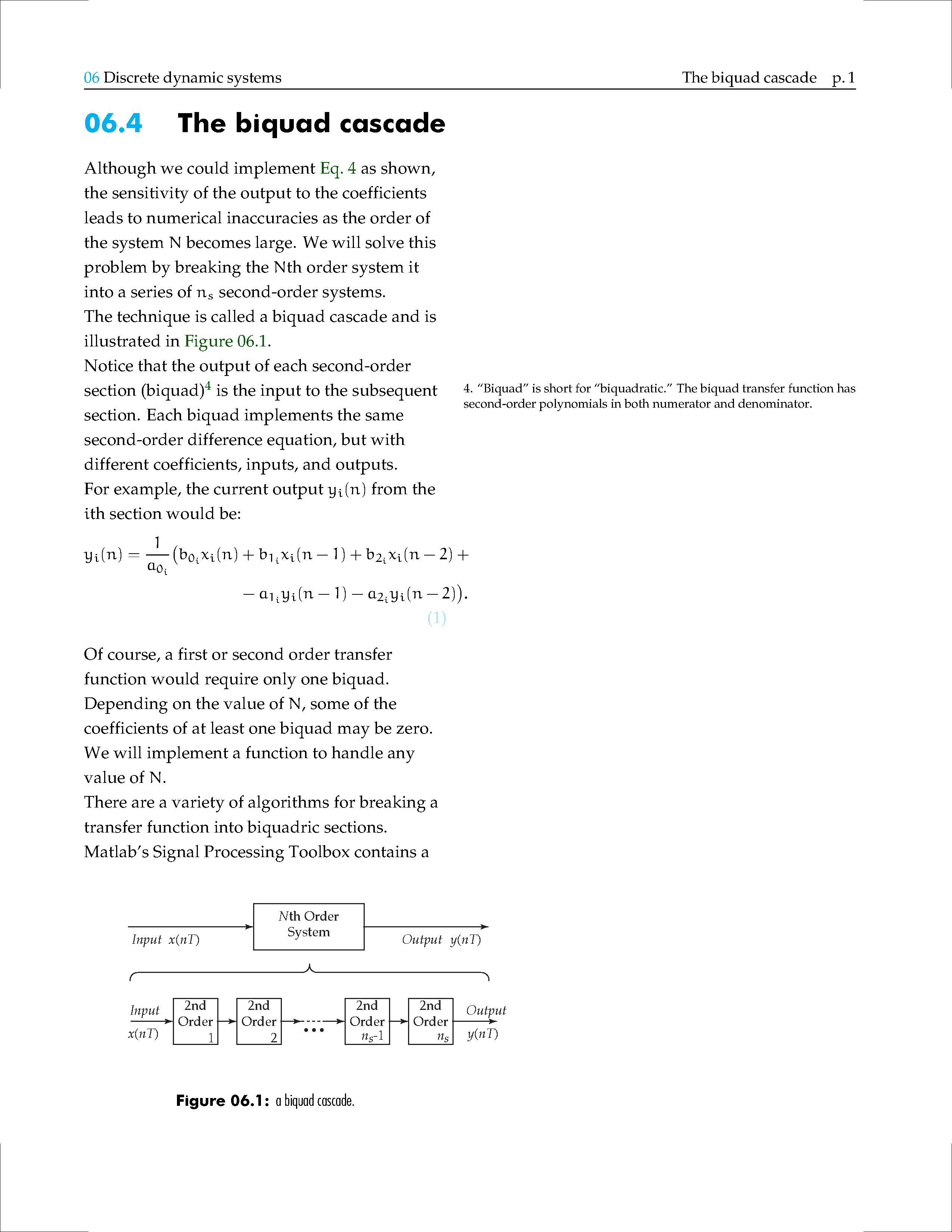 06.4 The biquad cascade
06.4 The biquad cascade
 06.exe Exercises for Chapter 06
06.exe Exercises for Chapter 06
![]() 06.L Lab Exercise Transfer function generator
06.L Lab Exercise Transfer function generator
 07.1 DC motor velocity control
07.1 DC motor velocity control
 07.2 Designing a PI controller
07.2 Designing a PI controller
 07.exe Exercises for Chapter 07
07.exe Exercises for Chapter 07
 07.L Lab Exercise DC motor PI velocity control
07.L Lab Exercise DC motor PI velocity control
 08.1 Path planning
08.1 Path planning
 08.2 Designing a PID controller
08.2 Designing a PID controller
 08.exe Exercises for Chapter 08
08.exe Exercises for Chapter 08
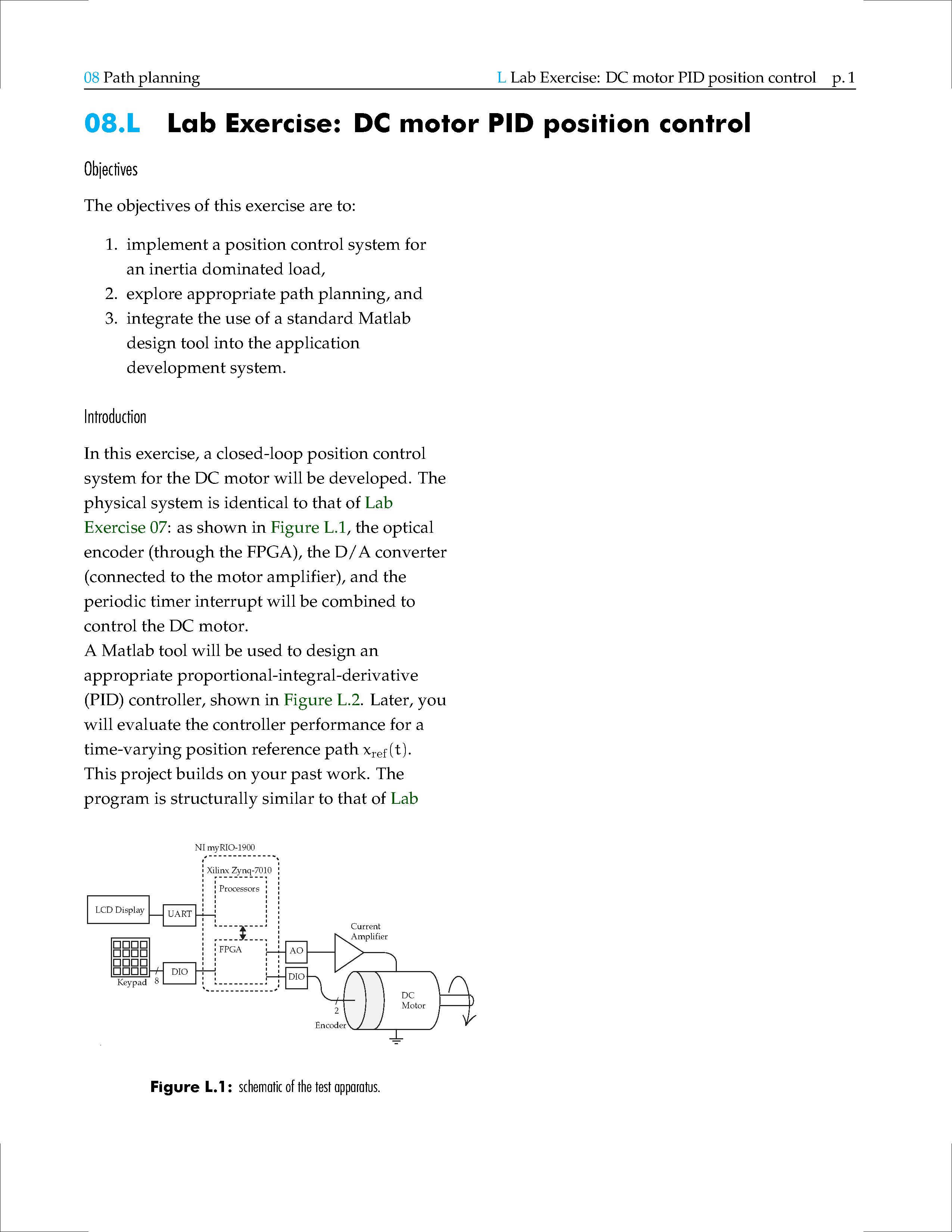 08.L Lab Exercise DC motor PID position control
08.L Lab Exercise DC motor PID position control